向量空间Vector Spaces
定义 1: 空间 R^n 由拥有 n 个分量的所有列向量 v 构成
向量空间的例子:
若\(A \in M_{m×n}(\mathbb{R})\)是一个 m×n 矩阵,则方程组\(A \cdot v = 0\)的所有解构成一个向量空间
并且对于所有的u,v,w∈V以及所有的λ,μ∈R,满足以下八条公理:
(1) v+w=w+v(加法交换律)
(2) u+(v+w)=(u+v)+w(加法结合律)
(3) 0V+v=v(零向量的加法单位元性质)
(4) 对于每一个v∈V,都存在一个元素x∈V,使得v+x=0V(加法逆元存在性)
(5) λ(μv)=(λμ)v(标量乘法结合律)
(6) 1⋅v=v(标量 1 的乘法单位元性质)
(7) (λ+μ)v=λv+μv(标量加法对向量的分配律)
(8) λ(v+w)=λv+λw(标量乘法对向量加法的分配律)
证明向量组是向量空间 / 变换是线性的
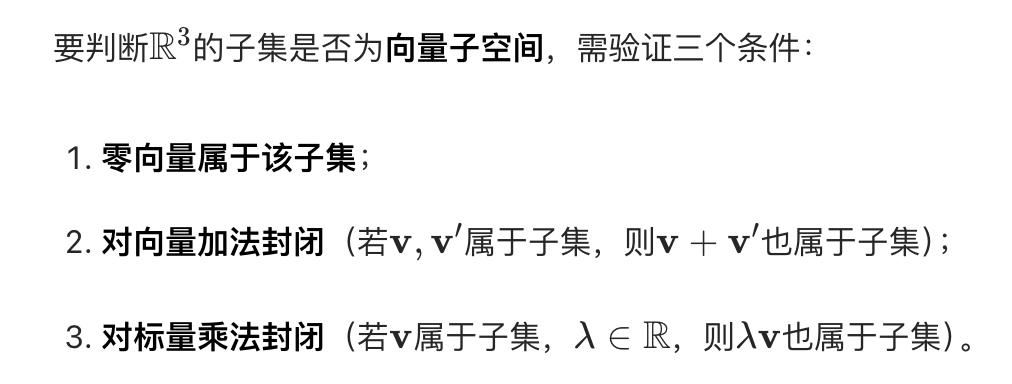
向量空间要求子空间内向量的线性组合也属于子空间,具体来说:
如果 \(\boldsymbol{v}\) 和 \(\boldsymbol{w}\) 是该子空间中的向量,c 是任一标量,那么:
- \(\boldsymbol{v} + \boldsymbol{w}\) 属于这个子空间
- (ii) \(c\boldsymbol{v}\) 属于这个子空间
- 此外必须包含0向量,需要单独验证这一点
类似的一个变换T是线性的,当且仅当它满足两个性质:
(i) 对所有向量\(\mathbf{v},\mathbf{w}\),有\(T(\mathbf{v} + \mathbf{w}) = T(\mathbf{v}) + T(\mathbf{w})\);
(ii) 对所有标量\(\lambda\)和向量\(\mathbf{v}\),有\(T(\lambda \mathbf{v}) = \lambda T(\mathbf{v})\)。等价地,T必须满足\(T(\mathbf{0}) = \mathbf{0}\)。

证明一个集合是向量空间 V 的基(basis)需要验证两个条件:
- 张成性(Spanning):即 V 中的每一个元素都能表示为该集合中向量的线性组合
设 V 是一个向量空间,\(S = \{\mathbf{v}_1, \mathbf{v}_2, \dots, \mathbf{v}_k\}\) 是 V 中的一个向量组。若 V 中的每一个向量都可以表示为 S 中向量的线性组合(即对任意 \(\mathbf{v} \in V\),存在标量 \(c_1, c_2, \dots, c_k\) 使得 \(\mathbf{v} = c_1\mathbf{v}_1 + c_2\mathbf{v}_2 + \dots + c_k\mathbf{v}_k\)),则称向量组 S 张成向量空间 V,或 S 是 V 的一个张成组(Spanning Set)。
- 线性独立(Linear Independence):仅当所有线性组合的系数都为 0 时,组合结果才是零向量
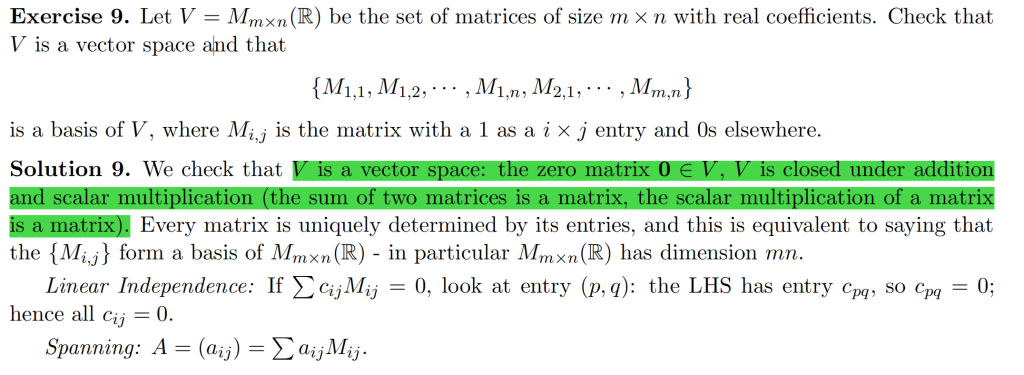
假设存在一组系数 \(c_{ij}\),使得:
\(\sum_{i=1}^m \sum_{j=1}^n c_{ij} M_{i,j} = 0 \quad (\text{零矩阵})\)
由于 \(M_{i,j}\) 只有第 i 行第 j 列的元素为 1,其余为 0,因此上述等式意味着所有 \(c_{ij} = 0\)。
这说明该集合线性无关。
维度就是基的个数
若一个向量组是线性无关的,且其张成(Span)等于整个空间,那么这个向量组就是空间的一组基,基中向量的个数就是空间的维数
子空间 (Subspaces)
是某个更大的向量空间(称为母空间)的子集,子集自身也满足向量空间的所有公理:包括1个要求和8个公理。子空间必须 “嵌套” 在另一个向量空间里,不能独立存在。
例如 \(\mathbb{R}^3\) 的子空间:
(L) 任何穿过 \((0,0,0)\) 的直线
(P) 任何穿过 \((0,0,0)\) 的平面
( \(\mathbb{R}^3\) ) 整个空间
(Z) 零向量 \((0,0,0)\)
非子空间示例):考虑\(\mathbb{R}^2\)中所有分量非负的向量构成的集合,即:
\(\{(x_1, x_2) \in \mathbb{R}^2: x_1 \geq 0, x_2 \geq 0\}\)
该子集是平面直角坐标系中的第一象限,它是\(\mathbb{R}^2\)的一个子集,但不是子空间
因为第一象限的集合对对加法封闭,但对数量乘法不封闭
同理可证明以下集合均为向量子空间:
反对称矩阵的集合。下三角矩阵的集合;上三角矩阵的集合;对角矩阵的集合;对称矩阵的集合;
更多不是向量子空间的例子证明:
所有满足 \(v_2 v_3 = 0\) 的向量 \(\boldsymbol{v}\) 构成的集合
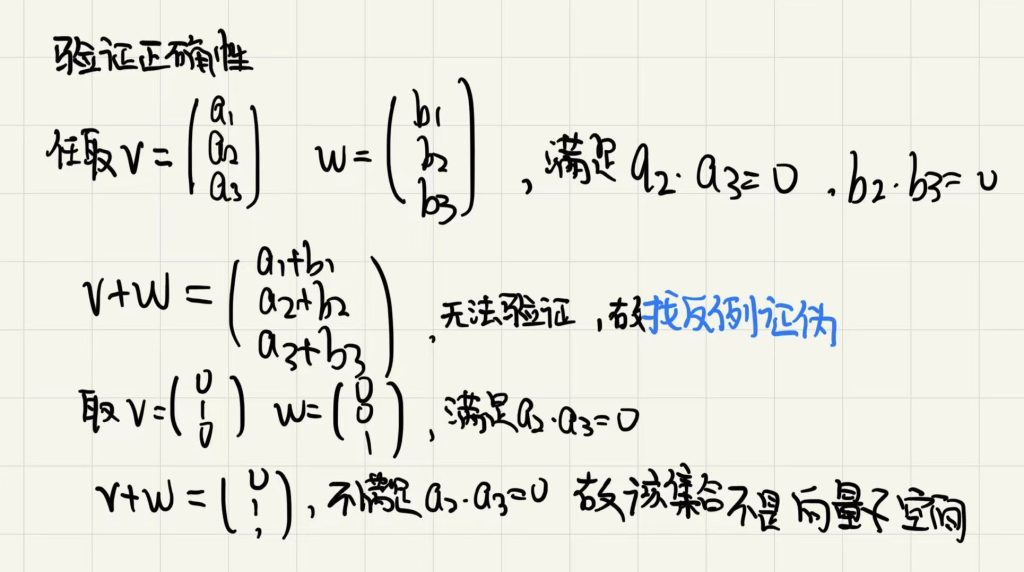
计算 \(\boldsymbol{v} + \boldsymbol{w} = \begin{pmatrix} 0 + 0 \\ 1 + 0 \\ 0 + 1 \end{pmatrix} = \begin{pmatrix} 0 \\ 1 \\ 1 \end{pmatrix}\),此时 \(v_2 v_3 = 1 \times 1 = 1 \neq 0\),不满足 \(v_2 v_3 = 0\),故 \(\boldsymbol{v} + \boldsymbol{w} \notin V\),不满足对加法封闭。因此,该集合不是向量子空间
所有满足 \(v_3 – v_2 + 3v_1 = 0\) 的向量 \(\boldsymbol{v} = \begin{pmatrix} v_1 \\ v_2 \\ v_3 \end{pmatrix}\) 构成的平面
设该集合为 V。
- 包含零向量:零向量 \(\boldsymbol{0} = \begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix}\),代入 \(v_3 – v_2 + 3v_1\) 得 \(0 – 0 + 3 \times 0 = 0\),满足条件,故 \(\boldsymbol{0} \in V\)。
- 对加法封闭:任取 \(\boldsymbol{v} = \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix}\),\(\boldsymbol{w} = \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix} \in V\),则 \(a_3 – a_2 + 3a_1 = 0\),\(b_3 – b_2 + 3b_1 = 0\)。\(\boldsymbol{v} + \boldsymbol{w} = \begin{pmatrix} a_1 + b_1 \\ a_2 + b_2 \\ a_3 + b_3 \end{pmatrix}\),代入 \(v_3 – v_2 + 3v_1\) 得:\((a_3 + b_3) – (a_2 + b_2) + 3(a_1 + b_1) = (a_3 – a_2 + 3a_1) + (b_3 – b_2 + 3b_1) = 0 + 0 = 0\),故 \(\boldsymbol{v} + \boldsymbol{w} \in V\)。
- 对标量乘法封闭:任取 \(\boldsymbol{v} = \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix} \in V\),标量 \(k \in \mathbb{R}\),则 \(k\boldsymbol{v} = \begin{pmatrix} k a_1 \\ k a_2 \\ k a_3 \end{pmatrix}\),代入 \(v_3 – v_2 + 3v_1\) 得:\(k a_3 – k a_2 + 3k a_1 = k(a_3 – a_2 + 3a_1) = k \times 0 = 0\),故 \(k\boldsymbol{v} \in V\)。因此,该集合是向量子空间。
由两个给定向量 \(\begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix}\) 和 \(\begin{pmatrix} 2 \\ 0 \\ 1 \end{pmatrix}\) 的所有线性组合构成的集合
设该集合为 V,线性组合形式为 \(k\begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix} + l\begin{pmatrix} 2 \\ 0 \\ 1 \end{pmatrix} = \begin{pmatrix} k + 2l \\ k \\ l \end{pmatrix}\)(\(k, l \in \mathbb{R}\))。
- 包含零向量:当 \(k = 0\),\(l = 0\) 时,得到零向量 \(\boldsymbol{0} = \begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix}\),故 \(\boldsymbol{0} \in V\)。
- 对加法封闭:任取 \(\boldsymbol{v} = k_1\begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix} + l_1\begin{pmatrix} 2 \\ 0 \\ 1 \end{pmatrix}\),\(\boldsymbol{w} = k_2\begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix} + l_2\begin{pmatrix} 2 \\ 0 \\ 1 \end{pmatrix} \in V\),则 \(\boldsymbol{v} + \boldsymbol{w} = (k_1 + k_2)\begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix} + (l_1 + l_2)\begin{pmatrix} 2 \\ 0 \\ 1 \end{pmatrix}\),仍为两个向量的线性组合,故 \(\boldsymbol{v} + \boldsymbol{w} \in V\)。
- 对标量乘法封闭:任取 \(\boldsymbol{v} = k\begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix} + l\begin{pmatrix} 2 \\ 0 \\ 1 \end{pmatrix} \in V\),标量 \(m \in \mathbb{R}\),则 \(m\boldsymbol{v} = mk\begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix} + ml\begin{pmatrix} 2 \\ 0 \\ 1 \end{pmatrix}\),仍为两个向量的线性组合,故 \(m\boldsymbol{v} \in V\)。
因此,该集合是向量子空间
子空间是向量空间的一个子集,且该子集本身也是一个向量空间:子空间中元素的线性组合仍属于这个子空间。需要注意的是,零向量\(0_V\)属于每一个子空间,实际上,仅包含零向量的集合本身就是最小的向量空间
定理:设X和Y是向量空间V的两个子空间,则\(X \cap Y\)(X与Y的交集)以及
\(X + Y = \{x + y \mid x \in X, y \in Y\}\)(X与Y的和集)均为V的向量子空间
命题 3:设V是有限维向量空间,U是V的子空间,则\(\dim U \leq \dim V\),且当且仅当\(U = V\)时,\(\dim U = \dim V\)
- 空间 U 是母空间 V 的 “一部分”,所以 U 的 “大小”(维度)不可能超过 V。
- 只有当子空间 U 完全等于母空间 V 时,两者的维度才会相等(因为此时 U 就是 V 本身)。
例子:
- 母空间 \(V = \mathbb{R}^3\)(三维空间,\(\dim V = 3\))。
- 子空间 U 可以是 “过原点的平面”(二维,\(\dim U = 2 < 3\)),或 “过原点的直线”(一维,\(\dim U = 1 < 3\))。
- 只有当 \(U = \mathbb{R}^3\) 时,\(\dim U = 3 = \dim V\)。
习题 13:设X和Y是有限维向量空间V的两个子空间,已知\(X + Y\)和\(X \cap Y\)均为V的子空间,证明:
\(\dim X + \dim Y – \dim(X \cap Y) = \dim(X + Y)\)
(此公式称为子空间的维数公式,类似于集合的容斥原理 \(|A \cup B| = |A| + |B| – |A \cap B|\),这里把 “集合大小” 换成 “子空间维度”)
矩阵 A 的列空间 (The Column Space of A)
定义 3: 列空间是由矩阵的列向量线性组合形成的集合。矩阵 A 的列空间用 \(Col(A)\) 表示。
- 与 \(A\boldsymbol{x} = \boldsymbol{b}\) 的联系:事实 1: 当且仅当 \(\boldsymbol{b}\) 属于 \(Col(A)\),\(A\boldsymbol{x} = \boldsymbol{b}\) 可解。即 \(C(A) = \{A\boldsymbol{x}\}\)。
- 与矩阵所在的高维空间的联系:对于一个 m 行 n 列的矩阵,由于矩阵中的每个列向量 (由 m 个实数组成) 都属于 \(\mathbb{R}^m\),所以 \(C(A)\) 是 \(\mathbb{R}^m\) (而不是 \(\mathbb{R}^n\)) 的一个子空间。比如对于如下矩阵 A,向量 \(\boldsymbol{x}\),以及 \(\boldsymbol{b} = A\boldsymbol{x}\)
设矩阵 \(A = \begin{pmatrix} 1 & 2 \\ 3 & 6 \\ 4 & 8 \end{pmatrix}\),它的列向量分别是 \(\vec{a_1} = \begin{pmatrix} 1 \\ 3 \\ 4 \end{pmatrix}\),\(\vec{a_2} = \begin{pmatrix} 2 \\ 6 \\ 8 \end{pmatrix}\)。
根据定义,列空间 \(Col(A)\) 是这两个列向量所有线性组合的集合,即 \(Col(A) = \{ c_1\vec{a_1} + c_2\vec{a_2} \mid c_1, c_2 \in \mathbb{R} \}\)。
观察这两个列向量,发现 \(\vec{a_2} = 2\vec{a_1}\),所以它们是线性相关的。此时列空间可以表示为 \(Col(A) = \{ c_1\vec{a_1} + 2c_1\vec{a_1} \mid c_1 \in \mathbb{R} \} = \{ 3c_1\vec{a_1} \mid c_1 \in \mathbb{R} \}\),其实就是由 \(\vec{a_1}\) 张成的直线,是 \(\mathbb{R}^3\) 的一个子空间。
再看线性方程组 \(Ax = b\),其中 \(x = \begin{pmatrix} x_1 \\ x_2 \end{pmatrix}\),\(b = \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix}\)。根据 \(Ax = b\) 可解的条件,当且仅当 b 属于 \(Col(A)\) 时,方程组有解。比如取 \(b = \begin{pmatrix} 3 \\ 9 \\ 12 \end{pmatrix}\),因为 \(b = 3\vec{a_1}\),属于 \(Col(A)\),所以方程组 \(\begin{cases} x_1 + 2x_2 = 3 \\ 3x_1 + 6x_2 = 9 \\ 4x_1 + 8x_2 = 12 \end{cases}\) 有解(如 \(x_1 = 3, x_2 = 0\) 等);而如果取 \(b = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}\),它不属于 \(Col(A)\),那么方程组 \(Ax = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}\) 就无解。
矩阵A的零空间:解\(Ax = 0\) (The Nullspace of A)
对于一个\(m * n\)的矩阵A:不同于列空间描述的是矩阵A内所有列的线性组合,以及\(Ax = b\)中b的所有可能的值;矩阵A的零空间\(N(A)\)描述的是使得\(Ax = 0\)的x的所有解
矩阵A的列空间是\(R^m\)的一个子空间,而矩阵A的零空间是\(R^n\)的一个子空间(因为是m行n列)
矩阵 \(A = \begin{pmatrix} 1 & 1 \\ 2 & 2 \end{pmatrix}\),考虑线性方程组 \(Ax = 0\),即:
\(\begin{cases} x_1 + x_2 = 0 \\ 2x_1 + 2x_2 = 0 \end{cases}\)
对其进行行简化,第二个方程减去第一个方程的 2 倍,得到:
\(\begin{cases} x_1 + x_2 = 0 \\ 0 = 0 \end{cases}\)
令 \(x_2 = t\)(\(t \in \mathbb{R}\) 为任意常数),则 \(x_1 = -t\)。因此,方程组的解可表示为:
\(x = \begin{pmatrix} x_1 \\ x_2 \end{pmatrix} = t\begin{pmatrix} -1 \\ 1 \end{pmatrix}\)
矩阵 A 是 \(2 \times 2\) 矩阵,其零空间 \(N(A)\) 就是所有形如 \(t\begin{pmatrix} -1 \\ 1 \end{pmatrix}\)(\(t \in \mathbb{R}\))的向量构成的集合,在平面 \(\mathbb{R}^2\) 中是一条过原点的直线,显然是 \(\mathbb{R}^2\) 的一个子空间。
设矩阵 \(A = \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\)(单位矩阵,满秩),考虑线性方程组 \(Ax = 0\),即:
\(\begin{cases} x_1 = 0 \\ x_2 = 0 \end{cases}\)
这个方程组只有唯一解 \(x = \begin{pmatrix} 0 \\ 0 \end{pmatrix}\)(零向量)。因此,矩阵 A 的零空间 \(N(A)\) 仅包含零向量
线性无关与基
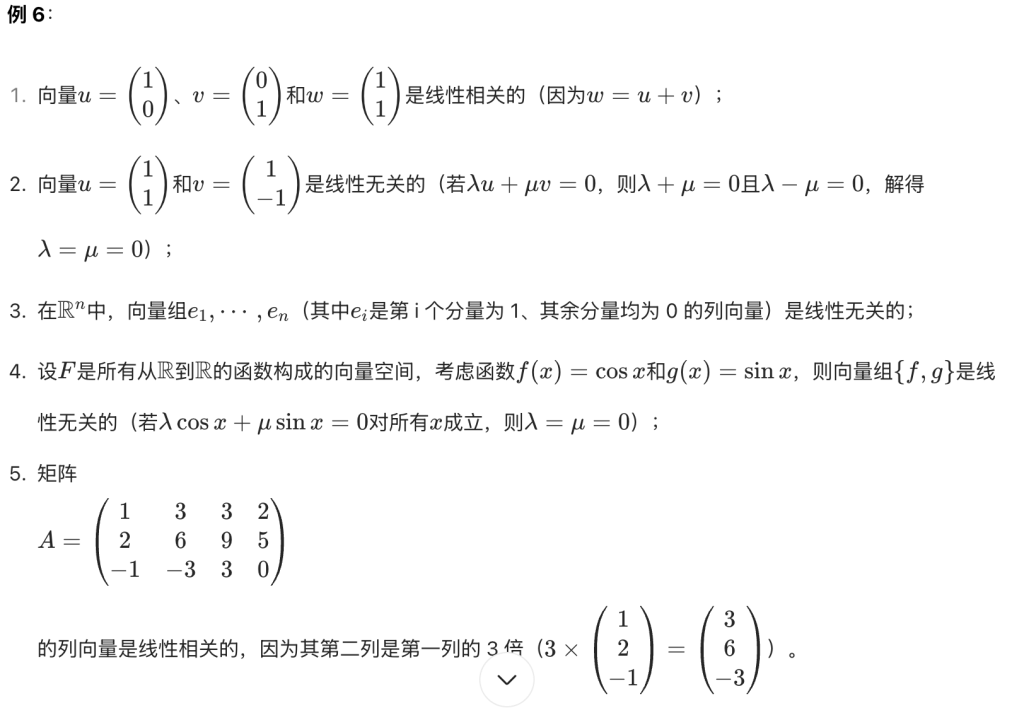
设V是一个向量空间,\(v_1, \cdots, v_n \in V\)。表达式\(\lambda_1 v_1 + \cdots + \lambda_n v_n\)(其中\(\lambda_i\)为实数,即标量)称为向量\(v_1, \cdots, v_n\)的一个线性组合。
定义 3:设V是一个向量空间。若仅当\(\lambda_1 = \cdots = \lambda_n = 0\)时,才有\(\sum_{i=1}^n \lambda_i v_i = 0_V\)成立,则称向量组\(v_1, \cdots, v_n\)是线性无关的。
若向量组\(\{v_1, \cdots, v_n\}\)不是线性无关的,则称其为线性相关的。
生成组与张成空间
定义 4:设\(v_1, \cdots, v_n \in V\)是一个向量组。该向量组的张成空间(记为\(Span(v_1, \cdots, v_n)\)或\(\langle v_1, \cdots, v_n \rangle\))是由该向量组所有线性组合构成的集合,即:
\(Span(v_1, \cdots, v_n) = \left\{ \sum_{i=1}^n \lambda_i v_i \mid (\lambda_1, \cdots, \lambda_n) \in \mathbb{R}^n \right\}\)
定义 5:若向量组\(\{v_1, \cdots, v_n\} \subset V\)的张成空间等于V(即\(Span(v_1, \cdots, v_n) = V\)),则称该向量组是V的一个生成组。

要判断向量组\(\{u, v, w\}\)是否是\(\mathbb{R}^3\)的生成组,需看是否任意\(\mathbb{R}^3\)中的向量都能由u、v、w线性表示,这等价于由u、v、w构成的矩阵的秩是否为3(因为\(\mathbb{R}^3\)的维数是3)。
首先,构造矩阵\(A = \begin{pmatrix}1&0&1\\-1&1&0\\0&-1&-1\end{pmatrix}\)。
然后,对矩阵A进行初等行变换:
- 第一行保持不变:\(R_1: (1, 0, 1)\)。
- 第二行\(R_2 = R_2 + R_1\),得到\((-1 + 1, 1 + 0, 0 + 1)=(0, 1, 1)\)。
- 第三行\(R_3 = R_3 + R_2\)(这里的\(R_2\)是变换后的第二行),得到\((0 + 0, -1 + 1, -1 + 1)=(0, 0, 0)\)。
变换后的矩阵为\(\begin{pmatrix}1&0&1\\0&1&1\\0&0&0\end{pmatrix}\),其秩为2,小于3(\(\mathbb{R}^3\)的维数)。
根据向量组生成空间的秩的性质,向量组\(\{u, v, w\}\)生成的空间的维数是2,而\(\mathbb{R}^3\)的维数是3,所以不是任意\(\mathbb{R}^3\)中的向量都能由u、v、w线性表示。
因此,向量组\(\{u, v, w\}\)不是\(\mathbb{R}^3\)的生成组
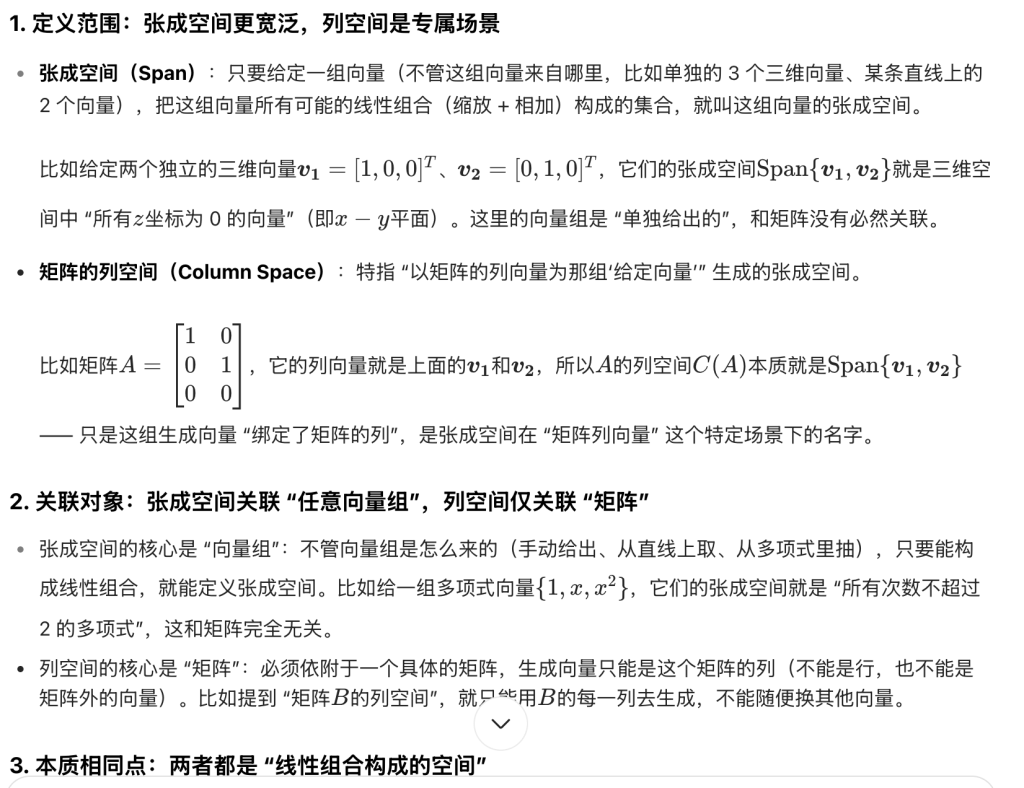
矩阵列空间和向量组的张成空间的区别:
基与向量空间的维数
定义 6:若向量组\(\{v_1, \cdots, v_n\} \subset V\)满足以下两个条件,则称其为向量空间V的一个基:
- 线性无关;
- 是V的生成组。
注 1:需要注意的是,基是向量序列而非单纯的向量集合,这意味着构成基的向量的顺序是有意义的。
例 8:的标准基是最重要的基之一。设是第 i 个分量为 1、其余分量均为 0 的向量。例如,在中,,;在中,
引理 1(基的关键性质):若\(\{v_1, \cdots, v_n\}\)是向量空间V的一个基,则V中的每一个元素v都能唯一地表示为\(\sum_{i=1}^n \lambda_i v_i\)的形式(其中\(\lambda_1, \cdots, \lambda_n \in \mathbb{R}\))
一个向量空间可以有多个不同的基。首先,由于基的顺序有意义,若\(\{v_1, \cdots, v_n\}\)是基,则\(\{v_n, \cdots, v_1\}\)也是基。更非平凡的例子是:若\(\{v_1, \cdots, v_n\}\)是基,则\(\{v_1, v_1 + v_2, \cdots, v_n\}\)(仅第一个向量不变,其余向量变为前一个向量与自身的和)也是基。
向量空间存在多个基这一性质非常有用,因为同一个元素v在不同基下的表示可以反映出v的不同性质,因此不同的基为我们提供了观察向量空间元素的不同视角。
定义 7:设V是一个存在生成组的向量空间,则V的维数定义为其任意一个基所含向量的个数。
由于一个向量空间可以有多个基,我们需要证明所有基所含向量的个数都相同,即维数是向量空间的固有属性。
定理 1:设V是一个向量空间,若向量组\(u_1, \cdots, u_m\)是V的生成组,且向量组\(v_1, \cdots, v_n\)是V中的线性无关组,则\(m \geq n\)。
由定理 1 可直接推出以下结论:
定理 2:一个向量空间V的任意两个基所含向量的个数都相同。
推论 3:若\(v_1, \cdots, v_k\)是有限维向量空间V中的线性无关组,则\(\dim V \geq k\)。
推论 4:设有限维向量空间V的维数为n,则V中任意\(n + 1\)个向量构成的向量组都是线性相关的。
推论 5:设有限维向量空间V的维数为n,则V中任意n个线性无关的向量构成的向量组都是V的基。
线性变换
当集合X和Y具有额外结构(如向量空间结构)时,我们关注的是那些能 “保持” 这种结构的函数或映射 —— 对于向量空间而言,就是保持向量加法和数乘运算的映射,即线性变换。
定义 8:设V和W是实向量空间,若映射\(T: V \to W\)满足以下两个条件,则称其为线性变换(或线性映射)
- 对所有\(\lambda \in \mathbb{R}\)和\(v \in V\),有\(T(\lambda v) = \lambda T(v)\)(数乘保持性);
缩放倍数在线性变化前后不变 - 对所有\(u, v \in V\),有\(T(u + v) = T(u) + T(v)\)(加法保持性)。
加法保持:“先把两个东西(向量)合并,再操作”,和 “先分别操作两个东西,再合并”,结果是一样的。
数乘保持:“先把一个东西(向量)放大 k 倍,再操作”,和 “先操作这个东西,再放大 k 倍”,结果是一样的。
引理 3:设\(T: V \to W\)是线性映射,则\(T(0_V) = 0_W\)(线性映射将零向量映射到零向量)
证明:对任意\(v \in V\),有\(0_V + v = v\)。由于T是线性映射,故\(T(0_V) + T(v) = T(v)\)。两边同时减去\(T(v)\),得\(T(0_V) = 0_W\)
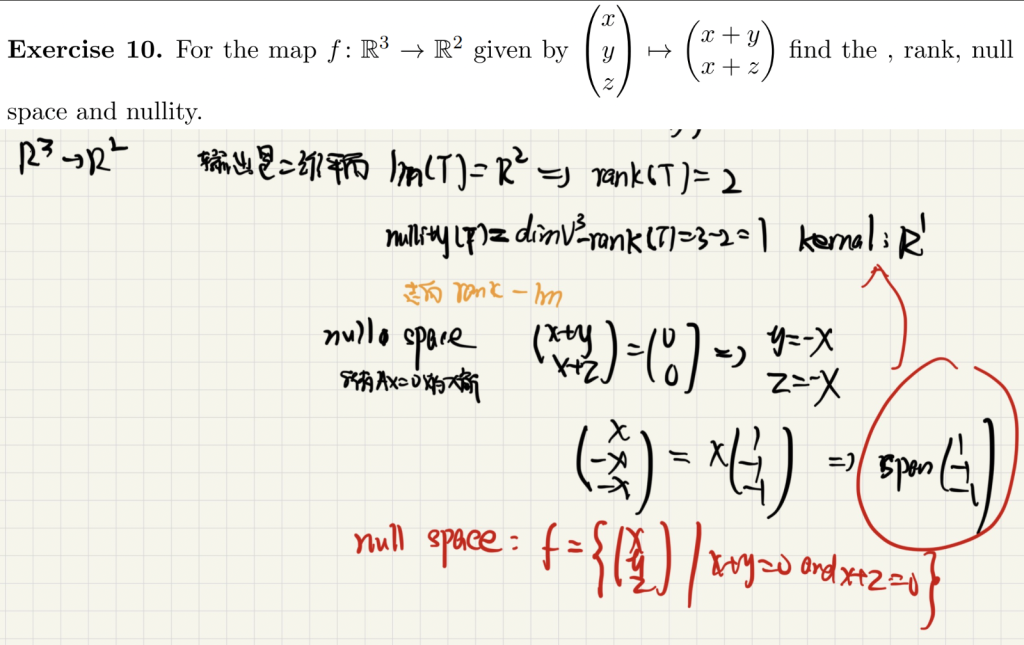
Kernel, image and the rank-nullity theorem. 核、像与秩 – 零化度定理
对每个线性映射,我们都可以关联两个重要的向量子空间:核与像。
核与像的定义:设V和W是向量空间,\(T: V \to W\)是线性变换:
- T的核 Kernel(记为ker T)是V中所有被T映射到\(0_W\)的向量构成的集合,即\(ker T = \{v \in V \mid T(v) = 0_W\}\);
被压成零向量的输入:核是 V 里的一个子集,里面装的是所有这样的 v:把 v 丢进 T 这个机器后,输出的是 W 里的零向量 \(0_W\)。矩阵A的kernel就是,矩阵Ax=0的解集(齐次方程组全部的解),也就是A的零空间。 - T的像Image(记为im T)是W中所有能被T映射到的向量构成的集合,即\(im T = \{w \in W \mid \exists v \in V, T(v) = w\}\)
“机器能产出的所有结果”。矩阵A的image就是,矩阵A所有列向量的linear combination,也就是A的列空间。
任意线性映射的核都是定义域空间V的子空间,像都是陪域空间W的子空间(可通过子空间的定义验证)
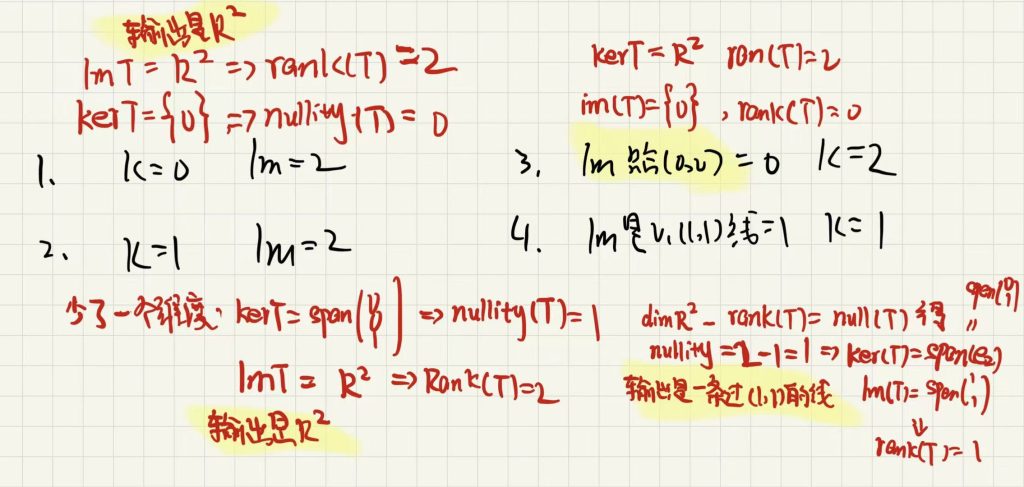
例 12:设\(T: \mathbb{R}^3 \to \mathbb{R}^4\)是线性映射,则T的核与像的可能情况如下:
- \(ker T = \{0_V\}\)(核仅含零向量):由秩 – 零化度定理,\(\dim im T = 3\),因此像为\(\mathbb{R}^4\)中维数为 3 的子空间(可由一个线性方程\(ax + by + cz + dt = 0\)定义);
- ker T是\(\mathbb{R}^3\)中经过原点的直线(可由两个线性方程\(\alpha x + \beta y + \gamma z = 0\)和\(\alpha’ x + \beta’ y + \gamma’ z = 0\)定义,其中\((\alpha, \beta, \gamma)\)与\((\alpha’, \beta’, \gamma’)\)不共线):此时\(\dim ker T = 1\),故\(\dim im T = 2\),像为\(\mathbb{R}^4\)中维数为 2 的子空间;
- ker T是\(\mathbb{R}^3\)中经过原点的平面(\(\dim ker T = 2\)):此时\(\dim im T = 1\),像为\(\mathbb{R}^4\)中维数为 1 的子空间;
- \(ker T = \mathbb{R}^3\)(核为整个定义域):此时T是零映射,故\(im T = \{0_W\}\)(像仅含零向量)。
解释:
情况 1:核只有零向量(\(\text{ker}T = \{0_V\}\))
- 核的意思:三维空间里,只有 “零向量(没东西)” 被机器运走后,会变成四维空间的零向量(啥也没运到)。
- 像的情况:因为 “没浪费多少货物”(只有零向量被浪费),所以机器能把三维空间里几乎所有向量都运到四维空间里,且运到的范围是四维空间中一个 “3 维子空间”(可以理解为四维空间里一个很大的 “区域”,用一个线性方程就能圈出来,比如 \(ax + by + cz + dt = 0\))。
情况 2:核是三维里过原点的直线(\(\text{ker}T\) 是直线)
- 核的意思:三维空间里,有一条 “直线上的所有向量”(比如从原点出发的某条直线上的货物),被机器运走后,都变成四维空间的零向量(这些货物白运了,没送到有效位置)。
- 像的情况:因为 “浪费了一条直线的货物”,所以机器能运到四维空间的范围变小了,是一个 “2 维子空间”(比情况 1 的范围小,是四维里的一个平面类区域)。
情况 3:核是三维里过原点的平面(\(\text{ker}T\) 是平面)
- 核的意思:三维空间里,有一个 “平面上的所有向量”(比如从原点出发的某张平面上的货物),被机器运走后,都变成四维空间的零向量(浪费了一整个平面的货物)。
- 像的情况:浪费更多了,机器能运到四维空间的范围更小,是一个 “1 维子空间”(四维里的一条直线类区域)。
情况 4:核是整个三维空间(\(\text{ker}T = \mathbb{R}^3\))
- 核的意思:三维空间里所有向量(所有货物),被机器运走后,都变成四维空间的零向量(全浪费了,啥也没送到)。
- 像的情况:机器等于 “白干”,四维空间里只有零向量(啥也没运到),这时候机器就是 “零映射”(啥也不输出)。
引理 4:线性映射\(T: V \to W\)是单射( injective )的充要条件是\(ker T = \{0_V\}\)(核仅含零向量)
定义 10:设V和W是有限维向量空间,\(T: V \to W\)是线性映射:
- T的零化度(null T)定义为核ker T的维数,即\(null T = \dim ker T\);
- T的秩(rk T)定义为像im T的维数,即\(rk T = \dim im T\)。
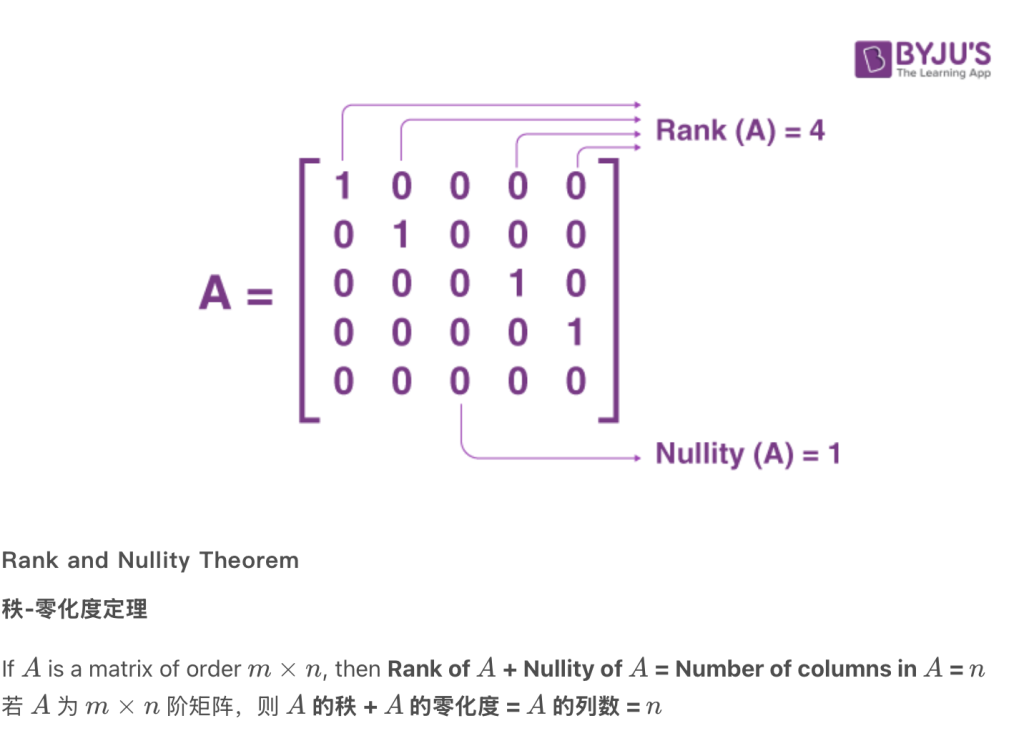
秩 – 零化度定理

秩、零度如何与核、像联系起来:
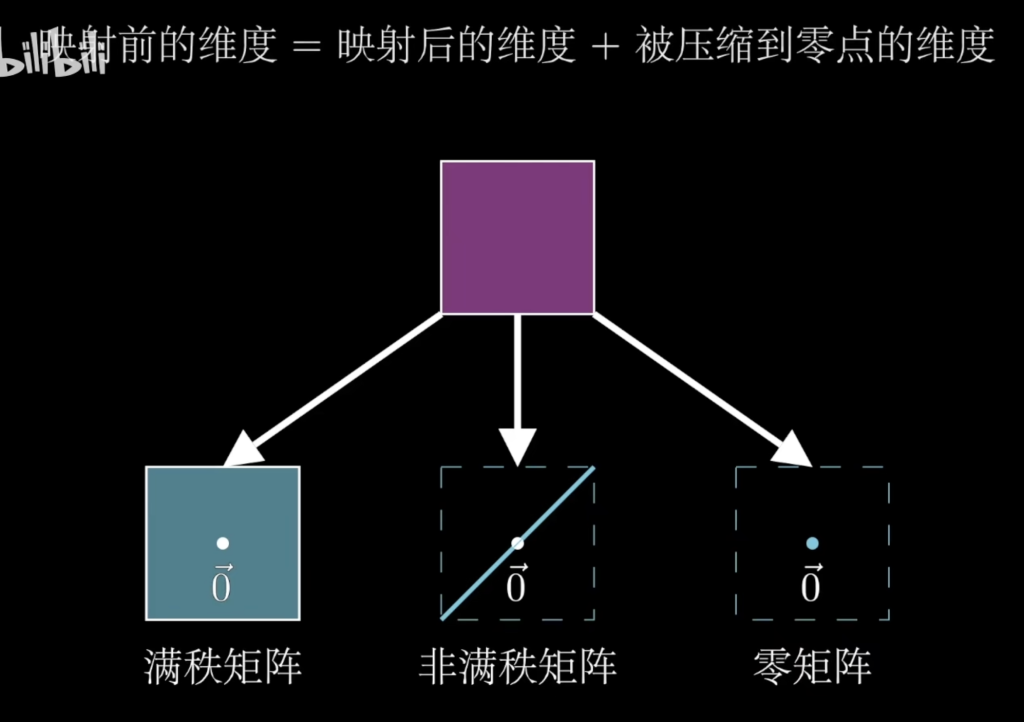
- 零度(nullity (T)) = 矩阵矩阵Row-echelon Form的(行阶梯形)零行数 = 核空间(ker T)的维度 又称为零空间
- 秩(rank (T)) = 矩阵Row-echelon Form的(行阶梯形)非零行数 = 像空间(Im T)的维度 又称为列空间(值域)
- 公式本质:原空间的维度 = 像空间的维度 + 核空间的维度
矩阵的列空间和零空间
矩阵 A 的列空间(Column space / range space)由矩阵 A 的所有列向量通过线性组合所生成的子空间
它描述了线性变换后所有可能的输出向量的集合。
零空间(Null space)是所有满足 \(A\vec{x} = \vec{0}\) 的向量 \(\vec{x}\) 构成的集合,也被称为核
是线性空间中的一个子空间,反映了线性变换中被映射到零向量的输入向量的全体
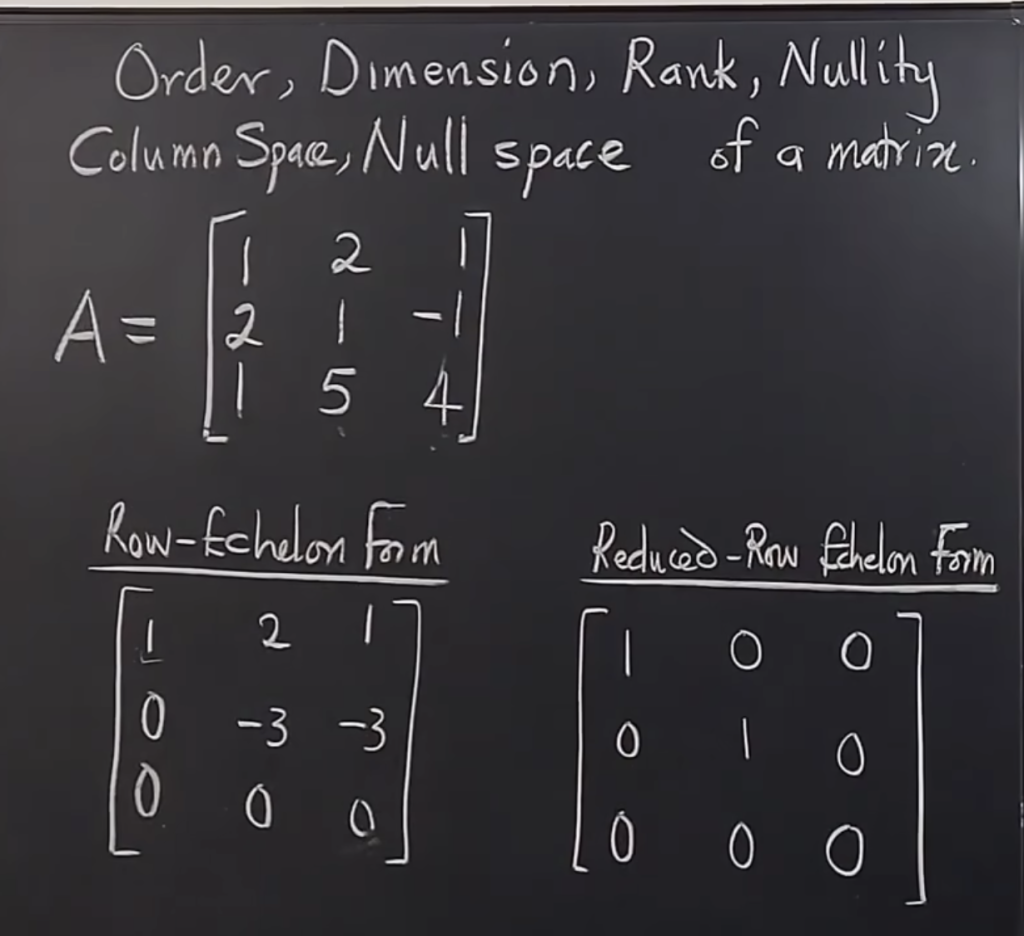
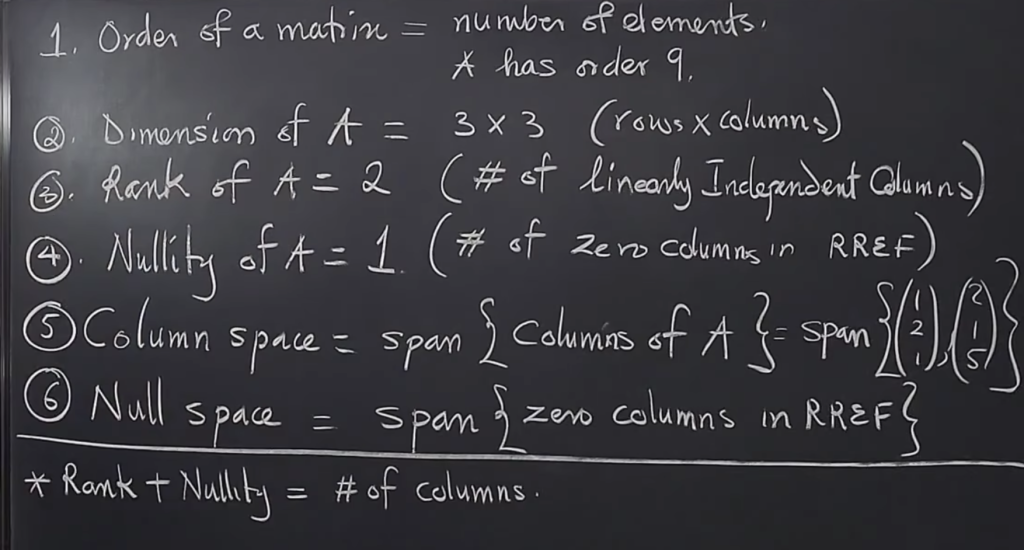
下面看一个矩阵,分析其维度、秩、零度,核和像空间
练习册习题
线性方程组与子空间
现在我们来探讨线性方程组相关运算与核空间、像空间概念之间的一些联系。
齐次线性方程组A⋅x=0的基础解系构成矩阵A的零空间NullA的一个基。
行空间定义:设A∈Mm×n(R)是一个m×n实矩阵,矩阵A的行空间(记为RowA)是由A的所有行向量的线性组合构成的子空间
定理 8:设A∈Mm×n(R),E∈Mm(R)是可逆矩阵,F∈Mn(R)是可逆矩阵,则Row(A)=Row(EA)(即左乘可逆矩阵不改变矩阵的行空间),且Col(A)=Col(AF)(即右乘可逆矩阵不改变矩阵的列空间)
线性映射的矩阵表示
线性映射是抽象的。但只要知道线性变换在某个基下的作用,就能知道它在整个向量空间中的作用
下面证明这一点:
设\(T: V \to W\)是一个线性变换,且已知V的一个基\(B = \{b_1, \cdots, b_n\}\)和W的一个基\(C = \{c_1, \cdots, c_m\}\)。
对于任意\(v \in V\),根据基的定义,v可表示为\(v = \sum_{i = 1}^{n} \lambda_i b_i\)(其中\(\lambda_i \in \mathbb{R}\))。由线性映射的性质可得:
\(T(v) = T\left( \sum_{i = 1}^{n} \lambda_i b_i \right) = \sum_{i = 1}^{n} \lambda_i T(b_i)\)
这表明,若T是线性映射,只要知道\(T(b_1), \cdots, T(b_n)\)(即T在基B中每个向量上的作用),就能确定\(T(v)\)对所有\(v \in V\)的值。
接下来,我们通过将\(T(b_i)\)(\(i = 1, \cdots, n\))用基\(C = \{c_1, \cdots, c_m\}\)表示,来记录T在基B上的作用。具体来说,我们可以定义标量\(a_{i,j} \in \mathbb{R}\)(\(i = 1, \cdots, n\);\(j = 1, \cdots, m\)),使得:
\(T(b_i) = \sum_{j = 1}^{m} a_{i,j} c_j\)
这些标量可以自然地构成一个\(m \times n\)矩阵,这个矩阵就称为线性变换T在 “初始基\(B = \{b_1, \cdots, b_n\}\)” 和 “终止基\(C = \{c_1, \cdots, c_m\}\)” 下的矩阵表示。
矩阵\(Mat_{B,C}(T)\)中,下标有两个字母B和C,分别表示:
- 第一个字母B:初始基,即线性变换T的 “输入空间”V的基。
- 第二个字母C:终止基,即线性变换T的 “输出空间”W的基。
简单说,\(Mat_{B,C}(T)\)描述的是:“从V的基B,到W的基C,线性变换T的矩阵表示”
定义 12:设\(T: V \to W\)是线性变换,\(B = \{b_1, \cdots, b_n\}\)是V的基,\(C = \{c_1, \cdots, c_m\}\)是W的基。
若标量\(\{a_{i,j}\}_{\substack{1 \leq i \leq n \\ 1 \leq j \leq m}}\)满足\(T(b_i) = \sum_{j = 1}^{m} a_{i,j} c_j\)(对所有\(1 \leq i \leq n\)),则称矩阵\(Mat_{B,C}(T) = (a_{i,j})\)(\(m \times n\)矩阵)为线性变换T在初始基B和终止基C下的矩阵。
当线性变换\(T: V \to V\)是从向量空间V到自身的映射时,若初始基和终止基都取为B,则T在基B下的矩阵记为\(Mat_{B}(T)\)。
注 5:矩阵\(Mat_{B,C}(T)\)的第i列对应于向量\(T(b_i)\)在基C下的坐标表示。
注 6:基B和C中向量的顺序对矩阵\(Mat_{B,C}(T)\)的构造是有影响的。改变基中向量的顺序,得到的矩阵通常也会不同。
例 14:设线性变换\(T: \mathbb{R}^2 \to \mathbb{R}^3\)定义为\(T\left( \begin{pmatrix} a \\ b \end{pmatrix} \right) = \begin{pmatrix} a + b \\ 3a – b \\ 2a + b \end{pmatrix}\)。
首先验证T是线性映射(略,可根据定义直接验证)。现在我们来求T在基\(B = \{e_1, e_2\}\)(\(\mathbb{R}^2\)的标准基,其中\(e_1 = \begin{pmatrix} 1 \\ 0 \end{pmatrix}\),\(e_2 = \begin{pmatrix} 0 \\ 1 \end{pmatrix}\))和基\(C = \{e_1′, e_2′, e_3’\}\)(\(\mathbb{R}^3\)的标准基,其中\(e_1′ = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}\),\(e_2′ = \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix}\),\(e_3′ = \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix}\))下的矩阵。
首先计算T在基B中每个向量上的作用:
\(T(e_1) = T\left( \begin{pmatrix} 1 \\ 0 \end{pmatrix} \right) = \begin{pmatrix} 1 + 0 \\ 3 \times 1 – 0 \\ 2 \times 1 + 0 \end{pmatrix} = \begin{pmatrix} 1 \\ 3 \\ 2 \end{pmatrix} = 1 \cdot e_1′ + 3 \cdot e_2′ + 2 \cdot e_3’\)
\(T(e_2) = T\left( \begin{pmatrix} 0 \\ 1 \end{pmatrix} \right) = \begin{pmatrix} 0 + 1 \\ 3 \times 0 – 1 \\ 2 \times 0 + 1 \end{pmatrix} = \begin{pmatrix} 1 \\ -1 \\ 1 \end{pmatrix} = 1 \cdot e_1′ + (-1) \cdot e_2′ + 1 \cdot e_3’\)
根据定义,矩阵\(Mat_{B,C}(T)\)的第 1 列是\(T(e_1)\)在基C下的坐标\((1, 3, 2)^T\),第 2 列是\(T(e_2)\)在基C下的坐标\((1, -1, 1)^T\),因此:
\(Mat_{B,C}(T) = \begin{pmatrix} 1 & 1 \\ 3 & -1 \\ 2 & 1 \end{pmatrix}\)
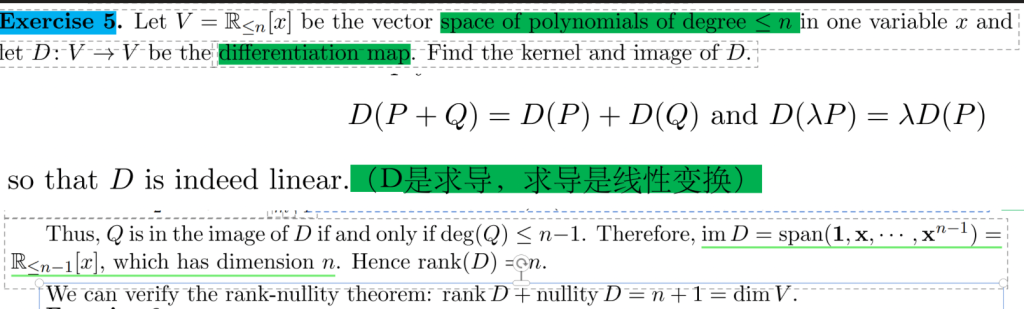
例 15:设\(V = \mathbb{R}_{\leq 3}[x]\)是所有次数不超过 3 的一元多项式构成的向量空间,\(D: V \to V\)是微分映射(即\(D(p(x)) = p'(x)\)),\(B = \{1, x, x^2, x^3\}\)是V的一个基。
计算D在基B中每个元素上的作用,并将结果用基B表示:
\(D(1) = 0 = 0 \cdot 1 + 0 \cdot x + 0 \cdot x^2 + 0 \cdot x^3\)
\(D(x) = 1 = 1 \cdot 1 + 0 \cdot x + 0 \cdot x^2 + 0 \cdot x^3\)
\(D(x^2) = 2x = 0 \cdot 1 + 2 \cdot x + 0 \cdot x^2 + 0 \cdot x^3\)
\(D(x^3) = 3x^2 = 0 \cdot 1 + 0 \cdot x + 3 \cdot x^2 + 0 \cdot x^3\)
因此,微分映射D在基B下的矩阵为:
\(Mat_{B}(D) = \begin{pmatrix} 0 & 1 & 0 & 0 \\ 0 & 0 & 2 & 0 \\ 0 & 0 & 0 & 3 \\ 0 & 0 & 0 & 0 \end{pmatrix}\)
定理 9:设S:U→V和T:V→W是线性映射,且:
(1) B={b1,⋯,bp}是U的基;
(2) C={c1,⋯,cm}是V的基;
(3) D={d1,⋯,dl}是W的基。
则有MatB,D(T∘S)=MatC,D(T)⋅MatB,C(S)(即复合映射的矩阵等于两个线性映射的矩阵的乘积,且乘法顺序与映射复合顺序一致
向量空间的不同基能为我们提供观察其元素的不同视角 —— 回顾一下关于两像素图像的例子,这一思路同样适用于线性映射。一个在线性映射在某组基下可能表现得复杂,但当选择合适的基后,其作用会变得更易于理解。
Vector space isomorphisms 向量空间的同构
定义 13:既是线性映射又是双射的映射被称为同构映射。若存在从向量空间V到向量空间W的同构映射T:V→W,则称V与W是同构的向量空间,记作V≅W。
- 单射injective:映射中 “一个原像只对应一个像,且不同原像对应不同像”(无重复对应)
- 满射surjective:映射中 “目标集合的每个元素都有原像对应”(无遗漏覆盖)
- 双射bijective:同时满足单射和满射的映射(既无重复、又无遗漏的一一对应)
由于单射的等价条件为Kernal仅包含0,而满射的等价条件为Image空间等于空间维度,而在线性映射的条件下,有秩零化度定理可知Kernal = 0 和 Image = dim 是可以互相推导的,因此在线性映射的前提下,单射和满射是可以互相推导的
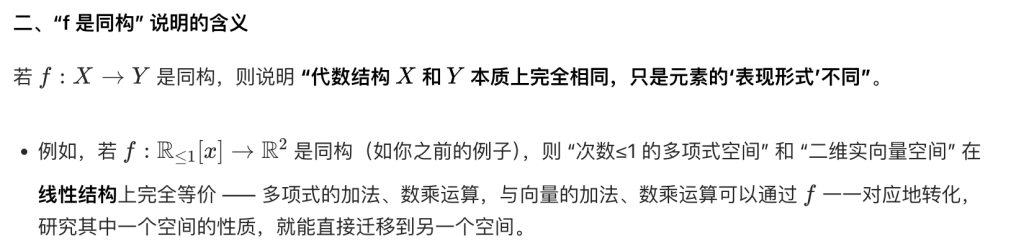
直观理解:“本质相同、只是外在形式不同” 的严格数学描述。同构的向量空间具有完全相同的向量空间性质,例如,它们的维数一定相等。
定理 14:若V≅W,则dimV=dimW。
定义 15:设V是一个实向量空间,其基为\(\mathcal{B} = \{\mathbf{b}_1, \cdots, \mathbf{b}_n\}\)。那么,将向量\(\mathbf{v}\)映射到\([\mathbf{v}]_{\mathcal{B}}\)的线性映射\([\cdot]_{\mathcal{B}}: V \to \mathbb{R}^n\)是一个同构(映射)。
解释:
- 实向量空间V:这里的向量空间是定义在实数域\(\mathbb{R}\)上的,向量的数乘运算中的数是实数。
- 基\(\mathcal{B}\):基是向量空间V中一组线性无关的向量,且V中任意向量都可以由这组基线性表示。
- 坐标映射\([\cdot]_{\mathcal{B}}\):对于V中的向量\(\mathbf{v}\),它在基\(\mathcal{B}\)下可以唯一地表示为\(\mathbf{v} = a_1\mathbf{b}_1 + a_2\mathbf{b}_2 + \cdots + a_n\mathbf{b}_n\)(其中\(a_1, a_2, \cdots, a_n \in \mathbb{R}\)),那么\([\mathbf{v}]_{\mathcal{B}} = \begin{pmatrix} a_1 \\ a_2 \\ \vdots \\ a_n \end{pmatrix}\)就是\(\mathbf{v}\)在基\(\mathcal{B}\)下的坐标向量,这个将\(\mathbf{v}\)映射到其坐标向量\([\mathbf{v}]_{\mathcal{B}}\)的过程就是坐标映射。
- 同构:如前面所解释,同构是既是线性映射又是双射的映射。这里的坐标映射\([\cdot]_{\mathcal{B}}\)满足线性性(因为向量的线性组合的坐标等于坐标的线性组合),同时它是双射(每个向量对应唯一的坐标向量,每个坐标向量也对应唯一的向量),所以它是一个同构映射,这也体现了任意n维实向量空间都与\(\mathbb{R}^n\)同构的思想,即它们在结构上是 “一样的”,只是向量的表现形式不同。
注:\([\cdot]_{\mathcal{B}}\)这个符号整体描述的是 “把向量\(\mathbf{v}\)转换为它在基\(\mathcal{B}\)下的坐标向量” 这样一个映射操作。是向量v在基B下的坐标向量(是一个n维列向量)。
这一结论的一个重要推论是,每一个有限维向量空间都与某一列向量空间同构。
如果遇到证明单射和双射的例题再回来看
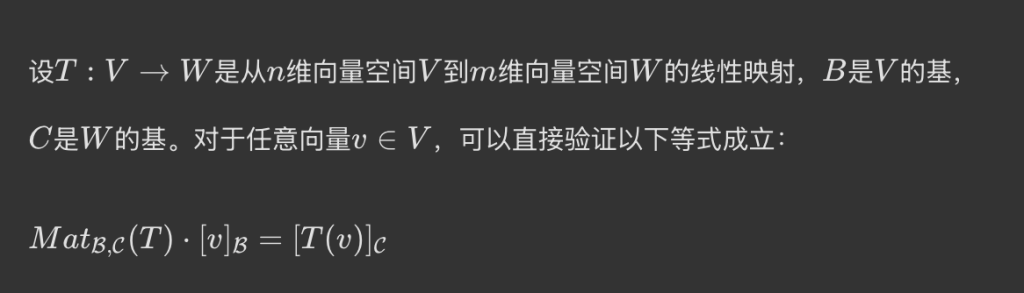
这个等式揭示了线性变换的矩阵表示与向量坐标之间的核心联系:
- 左边\(Mat_{B,C}(T) \cdot [v]_B\):
- \(Mat_{B,C}(T)\)是线性变换T在 “V的基B” 和 “W的基C” 下的矩阵表示(是一个\(m \times n\)矩阵)。
- \([v]_B\)是向量v在基B下的坐标向量(是一个n维列向量)。
- 两者相乘(矩阵乘向量)后,得到一个m维列向量。
- 右边\([T(v)]_C\):
- \(T(v)\)是向量v经过线性变换T后得到的向量(属于空间W)。
- \([T(v)]_C\)是\(T(v)\)在基C下的坐标向量(是一个m维列向量)。
等式的意思是:用线性变换T的矩阵表示,乘以原向量v的坐标,就能直接得到变换后向量\(T(v)\)的坐标。这把 “抽象的线性变换” 转化为 “具体的矩阵乘法”,是线性代数中用矩阵研究线性变换的关键桥梁。
课后例题:
证明f同构:证明其线性性 + 双射bijective(both injective and surjective).
证明 f 是同构
同构需要满足两个条件:f 是线性映射,且 f 是双射(单射且满射)。
步骤 1:证明 f 是线性映射
线性映射需满足加法保持性和数乘保持性:
- 加法保持性:对任意 \(p(x) = a_1x + b_1\),\(q(x) = a_2x + b_2\),\(f(p + q) = f((a_1 + a_2)x + (b_1 + b_2)) = \begin{pmatrix} (a_1 + a_2) – (b_1 + b_2) \\ b_1 + b_2 \end{pmatrix} = \begin{pmatrix} (a_1 – b_1) + (a_2 – b_2) \\ b_1 + b_2 \end{pmatrix} = f(p) + f(q)\)
- 数乘保持性:对任意标量 \(\lambda \in \mathbb{R}\),\(f(\lambda p) = f(\lambda a_1 x + \lambda b_1) = \begin{pmatrix} \lambda a_1 – \lambda b_1 \\ \lambda b_1 \end{pmatrix} = \lambda \begin{pmatrix} a_1 – b_1 \\ b_1 \end{pmatrix} = \lambda f(p)\)因此,f 是线性映射。
步骤 2:证明 f 是单射(Injective)
单射的等价条件是核(kernel)仅含零元素。核的定义是 \(\ker f = \{ p \in \mathbb{R}_{\leq 1}[x] \mid f(p) = \begin{pmatrix} 0 \\ 0 \end{pmatrix} \}\)。
设 \(p(x) = ax + b\),则 \(f(p) = \begin{pmatrix} a – b \\ b \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \end{pmatrix}\),即:
\(\begin{cases} a – b = 0 \\ b = 0 \end{cases}\)
由 \(b = 0\) 代入第一个方程得 \(a = 0\),因此仅当 \(a = 0\) 且 \(b = 0\) 时满足,即 \(\ker f = \{ 0 \}\),故 f 是单射。
步骤 3:证明 f 是满射(Surjective)
满射的定义是:对任意 \(\begin{pmatrix} c \\ d \end{pmatrix} \in \mathbb{R}^2\),存在 \(ax + b \in \mathbb{R}_{\leq 1}[x]\) 使得 \(f(ax + b) = \begin{pmatrix} c \\ d \end{pmatrix}\)。
由 \(f(ax + b) = \begin{pmatrix} a – b \\ b \end{pmatrix} = \begin{pmatrix} c \\ d \end{pmatrix}\),解方程组:
\(\begin{cases} a – b = c \\ b = d \end{cases}\)
得 \(b = d\),\(a = c + d\)。因此,取 \(p(x) = (c + d)x + d\),则 \(f(p) = \begin{pmatrix} c \\ d \end{pmatrix}\),故 f 是满射。
结论:因为 f 是线性映射,且是双射,所以 f 是 \(\mathbb{R}_{\leq 1}[x]\) 到 \(\mathbb{R}^2\) 的同构。
ES3课后习题:
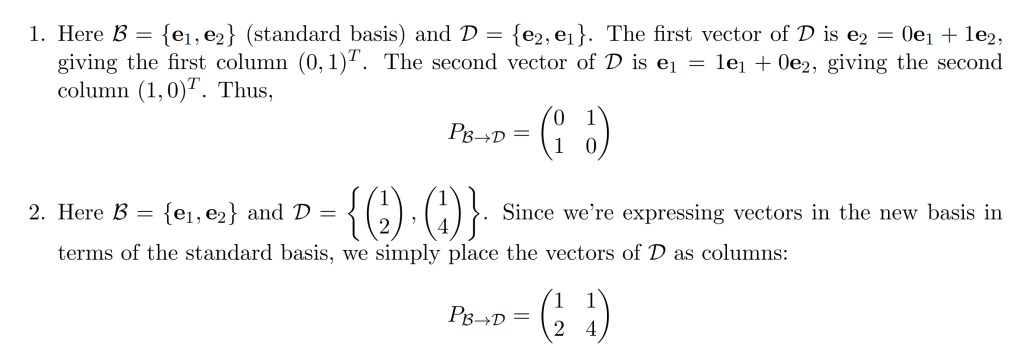
矩阵的列是新的基底在旧坐标系下的表示
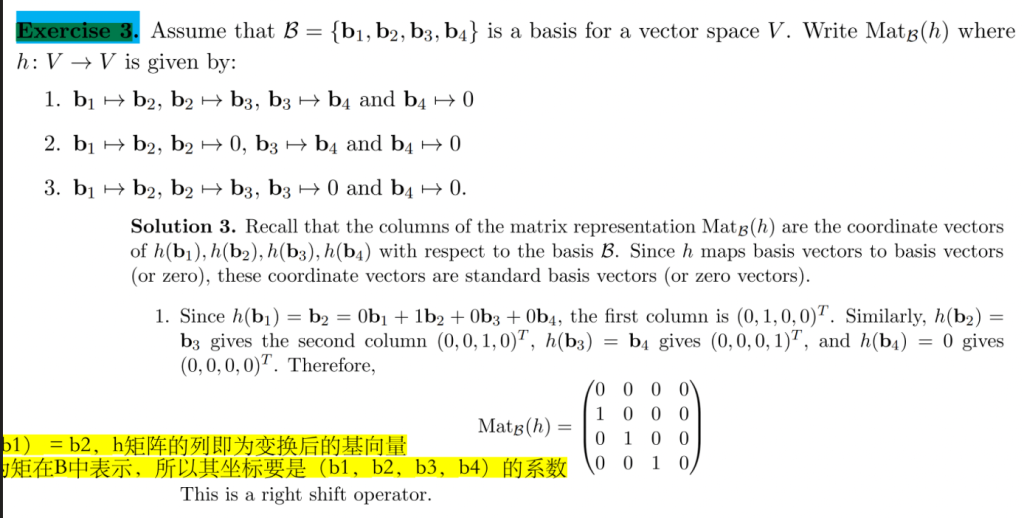
旧的基底之一是谁?b1
新的基底之一是谁?b2
旧的坐标系是谁?b1, b2, b3,b4
新的基底之一怎么用旧坐标系表示(0,1,0,0)
用(0,1,0,0)作为矩阵的第一列
并不是看向量应用变换后的结果,而是说某个空间的基底的前后变化
所以一开始我想的是用一个向量乘矩阵来推测矩阵的结构,当应该根据矩阵列向量的含义推测矩阵结构
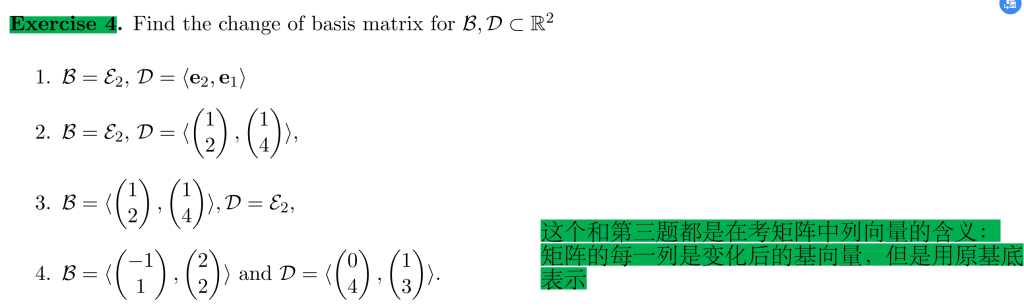
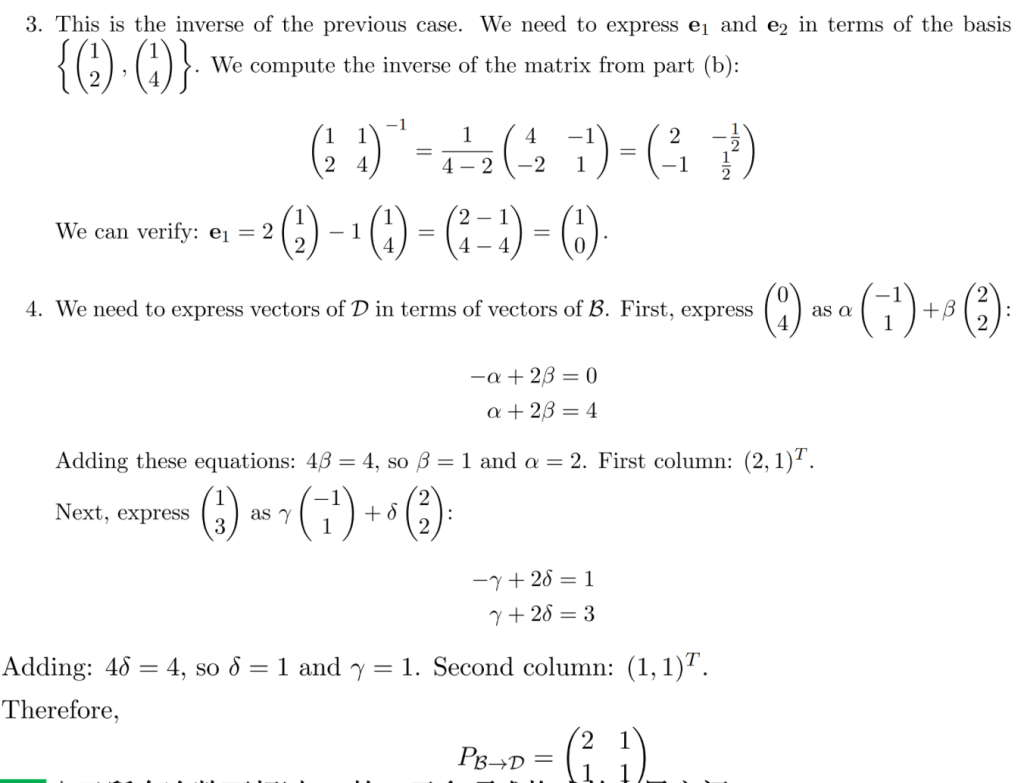
新坐标系的基底之一是谁?(0,4)
旧坐标系是什么?V = (-1,1)和(2,2)
如何用旧的坐标系表示新基底?X (-1,1) + Y (2,2) = (0,4)
(X,Y)作为矩阵的第一列
同理求出其他新坐标系的基底用旧坐标系的表示,补全矩阵
核(kernel)和像(image)的定义与性质仅在 “线性映射” 的框架下成立,所以要先验证是否为线性映射,然后根据求导的操作可知多项式参数的次数会减1,因此nullity为1,秩是n
最后可以用rank – nullity验证
核Kernel和像Image是集合,秩rank 和零度 nullity才是数字

从输出空间的维度入手先计算Im的维度
像和核有时要写成span的形式,null space 可以写成这种括号说明的形式

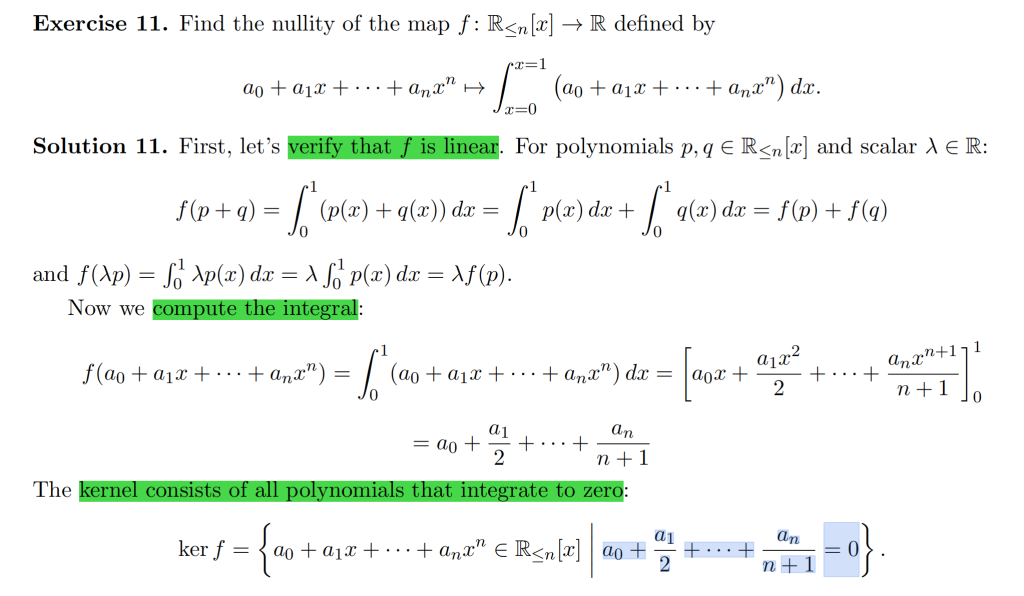
定积分的结果是一个实数,所以 \(\text{im}(f) \subseteq \mathbb{R}\),即像的维数 \(\text{rank}(f) = 1\)。
根据秩 – 零化度定理:
\(\dim V = \text{rank}(f) + \text{nullity}(f)\)
代入 \(\dim V = n+1\) 和 \(\text{rank}(f) = 1\),得:
\(n+1 = 1 + \text{nullity}(f)\)
解得 \(\text{nullity}(f) = n\)。
期中习题(包含除列空间和零空间之外的所有知识)
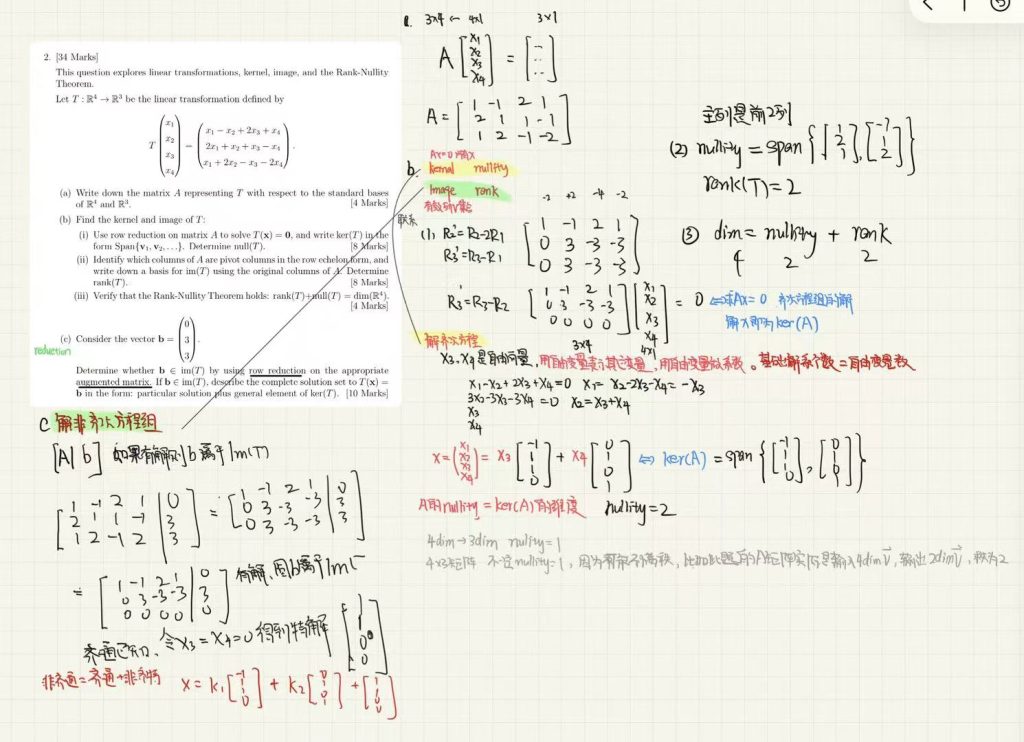
列空间由主元列对应的原矩阵列向量
零空间是方程 \(A\boldsymbol{x} = \boldsymbol{0}\) 的解空间