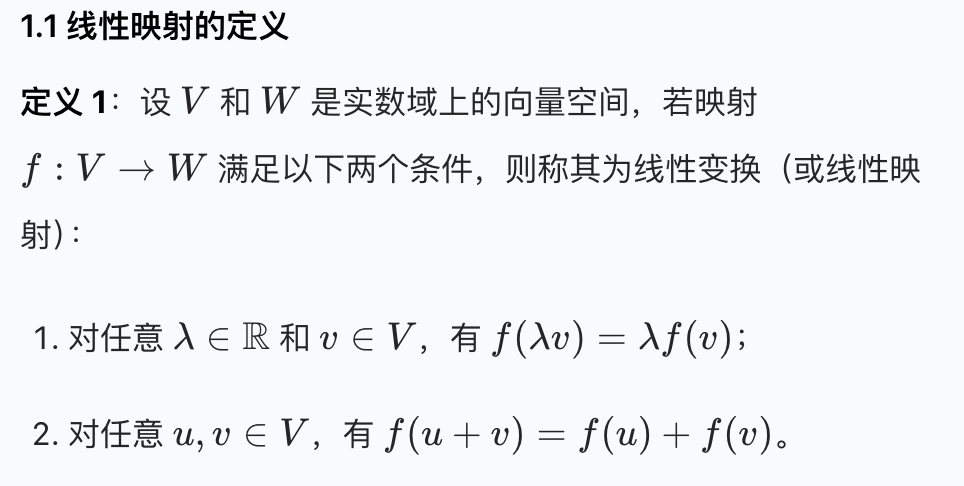
线性变换 Linear transformations

线性映射 linear maps.
Kernel, image and the rank-nullity theorem.
线性方程组与子空间
定理:方程组 \(A \cdot x = 0\) 的基础解系构成零空间 \(Null\ A\) 的一组基(废话)
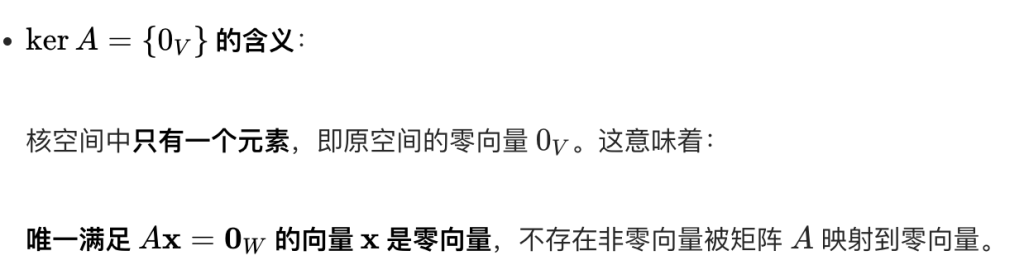
零空间本身就是由0元素列组成的空间,而Ax = 0,x只能为全是0的向量
定理:回顾:若存在矩阵 \(B \in M_n(\mathbb{R})\) 使得 \(AB = BA = Id\)(单位矩阵),则称矩阵 \(A \in M_n(\mathbb{R})\) 可逆。等价地,矩阵 A 可逆当且仅当 \(ker\ A = \{0_V\}\),或当且仅当 \(det\ A \neq 0\)。(废话)
定义 4:设 \(A \in M_{m \times n}(\mathbb{R})\) 是 \(m \times n\) 实矩阵,A 的行空间(Row\ A)是 A 的行向量张成的空间。
定理 3:设 \(A \in M_{m \times n}(\mathbb{R})\),\(E \in M_m(\mathbb{R})\) 和 \(F \in M_n(\mathbb{R})\) 是可逆矩阵,则 \(Row(A) = Row(EA)\) 且 \(Col(A) = Col(AF)\)
初等行变换不改变行向量的线性关系(比如,行交换、行缩放、行倍加都不会改变 “哪些行向量能被其他行向量线性表示” 这一性质)。因此,A 经过左乘可逆矩阵 E 后,行向量张成的空间(行空间)保持不变,即 \(\text{Row}(A) = \text{Row}(EA)\)
基变换公式
只要知道线性变换在一组基上的作用,就能知道它在整个向量空间上的作用。
\(\text{Mat}_{F,E}(Id)\) 是 “从基 E 到基 F 的恒等变换的矩阵表示”
步骤 1:明确核心概念
- 线性映射的矩阵表示:若线性映射 \(T: V \to V\) 在基 E 下的矩阵为 \(\text{Mat}_E(T)\),在基 F 下的矩阵为 \(\text{Mat}_F(T)\),则两者满足基变换公式:\(\text{Mat}_F(T) = \text{Mat}_{E,F}(\text{Id}) \cdot \text{Mat}_E(T) \cdot \text{Mat}_{F,E}(\text{Id})\)其中:
- \(\text{Mat}_{F,E}(\text{Id})\):从基 E 到基 F 的过渡矩阵(新基 F 用旧基 E 表示的矩阵);
- \(\text{Mat}_{E,F}(\text{Id})\):\(\text{Mat}_{F,E}(\text{Id})\) 的逆矩阵(旧基 E 用新基 F 表示的矩阵)。
步骤 2:已知条件梳理
- 线性映射 \(T: \mathbb{R}^2 \to \mathbb{R}^2\) 的定义:\(T\begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} -12x + 7y \\ -43x + 17y \end{pmatrix}\);
- 旧基 \(E = \{e_1, e_2\}\)(标准基,\(e_1 = \begin{pmatrix} 1 \\ 0 \end{pmatrix}, e_2 = \begin{pmatrix} 0 \\ 1 \end{pmatrix}\)),此时 \(\text{Mat}_E(T) = \begin{pmatrix} -12 & 7 \\ -43 & 17 \end{pmatrix}\)(直接由线性映射的坐标表达式得到);
- 新基 \(F = \{f_1, f_2\}\),其中 \(f_1 = \begin{pmatrix} 2 \\ 5 \end{pmatrix}, f_2 = \begin{pmatrix} 1 \\ 3 \end{pmatrix}\)。
步骤 3:构造过渡矩阵 \(\text{Mat}_{F,E}(\text{Id})\) 和其逆 \(\text{Mat}_{E,F}(\text{Id})\)
- \(\text{Mat}_{F,E}(\text{Id})\):新基 F 用旧基 E 表示的矩阵。由于 \(f_1 = 2e_1 + 5e_2\),\(f_2 = 1e_1 + 3e_2\),因此:\(\text{Mat}_{F,E}(\text{Id}) = \begin{pmatrix} 2 & 1 \\ 5 & 3 \end{pmatrix}\)
- \(\text{Mat}_{E,F}(\text{Id})\):旧基 E 用新基 F 表示的矩阵,即 \(\text{Mat}_{F,E}(\text{Id})\) 的逆矩阵。计算逆矩阵:\(\text{Mat}_{E,F}(\text{Id}) = \begin{pmatrix} 2 & 1 \\ 5 & 3 \end{pmatrix}^{-1} = \begin{pmatrix} 3 & -1 \\ -5 & 2 \end{pmatrix}\)(验证:\(\begin{pmatrix} 2 & 1 \\ 5 & 3 \end{pmatrix} \begin{pmatrix} 3 & -1 \\ -5 & 2 \end{pmatrix} = \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\),确实是逆矩阵。)
步骤 4:用基变换公式计算 \(\text{Mat}_F(T)\)
根据公式 \(\text{Mat}_F(T) = \text{Mat}_{E,F}(\text{Id}) \cdot \text{Mat}_E(T) \cdot \text{Mat}_{F,E}(\text{Id})\),代入矩阵计算:
\(\begin{align*} \text{Mat}_F(T) &= \begin{pmatrix} 3 & -1 \\ -5 & 2 \end{pmatrix} \cdot \begin{pmatrix} -12 & 7 \\ -43 & 17 \end{pmatrix} \cdot \begin{pmatrix} 2 & 1 \\ 5 & 3 \end{pmatrix} \\ &= \begin{pmatrix} 3 \times (-12) + (-1) \times (-43) & 3 \times 7 + (-1) \times 17 \\ -5 \times (-12) + 2 \times (-43) & -5 \times 7 + 2 \times 17 \end{pmatrix} \cdot \begin{pmatrix} 2 & 1 \\ 5 & 3 \end{pmatrix} \\ &= \begin{pmatrix} 7 & 4 \\ -26 & -1 \end{pmatrix} \cdot \begin{pmatrix} 2 & 1 \\ 5 & 3 \end{pmatrix} \\ &= \begin{pmatrix} 7 \times 2 + 4 \times 5 & 7 \times 1 + 4 \times 3 \\ -26 \times 2 + (-1) \times 5 & -26 \times 1 + (-1) \times 3 \end{pmatrix} \\ &= \begin{pmatrix} 34 & 19 \\ -57 & -29 \end{pmatrix} \end{align*}\)
步骤 5:验证(可选)
为了确认结果正确,可以直接计算 \(T(e_1)\) 和 \(T(e_2)\) 在新基 F 下的坐标,看是否与 \(\text{Mat}_{E,F}(T)\) 的列向量一致:
- \(T(e_1) = \begin{pmatrix} -12 \\ -43 \end{pmatrix}\),用 F 表示需解 \(-12e_1 – 43e_2 = a f_1 + b f_2\),代入 \(f_1, f_2\) 得 \(a = 7, b = -26\),即 \(T(e_1) = 7f_1 – 26f_2\);
- \(T(e_2) = \begin{pmatrix} 7 \\ 17 \end{pmatrix}\),同理解得 \(T(e_2) = 4f_1 – f_2\)。
这与 \(\text{Mat}_{E,F}(T) = \begin{pmatrix} 7 & 4 \\ -26 & -1 \end{pmatrix}\) 的列向量完全一致,验证了计算的正确性。
Vector space isomorphisms 向量空间同构
定义 :既是单射又是满射(即双射)的线性映射称为同构映射。若存在同构映射 ,则称向量空间 和 同构,记为 。
定义 7:设 V 是实向量空间,\(B = \{b_1, \cdots, b_n\}\) 是 V 的基,则将向量 v 映射到其坐标向量 \([v]_B\) 的线性映射是同构映射。
注 5:该结果的一个重要推论是,每个有限维实向量空间都与某个列向量空间同构。