线性函数
首先,若能确定输入与输出之间的变换关系,且输出与输入成比例,那么我们就称这种现象为线性现象。
生活里很多复杂问题,在 “小范围” 内都能近似成简单的线性关系。比如物理中的胡克定律(弹簧弹力和伸长量成正比),虽然只在一定范围内成立,但很多自然现象(比如势能变化对应的力)在 “稳定点附近” 都符合这种近似;再比如复杂的曲线函数,在某个点附近放大看,也会接近一条直线(对应线性函数)。线性代数就是把这种 “近似规律” 转化为数学工具,帮我们简化问题。
线性代数的关键发现是:线性映射和矩阵是一一对应的—— 每个线性映射都能写成矩阵的形式,反过来每个矩阵也对应一个线性映射。
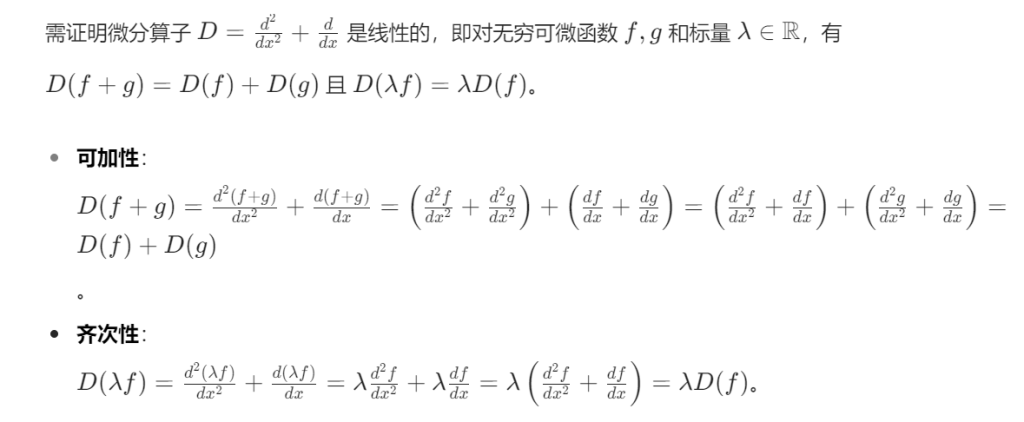
例题:证明算子是线性的
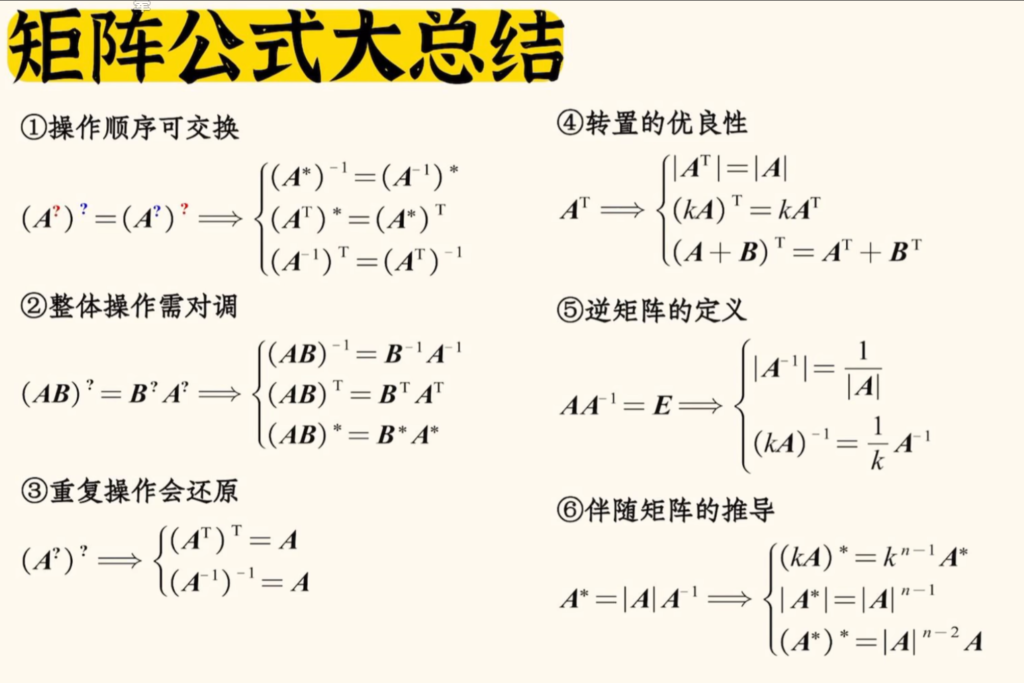
矩阵运算
正交矩阵
矩阵的列(或行)向量必须两两正交且均为单位向量

两两正交 – 旋转,单位向量 – 不拉伸 => 几何意义就是将单位矩阵做一些简单的变换旋转、镜像x
若矩阵A满足\(A^T = A^{-1}\),则称A为正交矩阵
\(A A^T = E\)(由 \(A^T A = E\) 可推出,因方阵左逆等于右逆)
线性方程组
齐次/非齐次线性方程组的基础解系和通解 – Skyshin34的博客
例题:
求解方程\(A \cdot x = b\),其中\(A = \begin{pmatrix} 3 & 1 \\ a & -1 \end{pmatrix}\),\(b = \begin{pmatrix} b \\ 1 \end{pmatrix}\),分析解的情况与参数a、b取值的关系。
对增广矩阵 \(\overline{A} = \begin{pmatrix} a & 1 & 1 \\ -1 & 2 & b \end{pmatrix}\) 做初等行变换:
- 交换第一行和第二行(使第一列第一个元素非负,方便计算):\(\overline{A} \rightarrow{R_1 \leftrightarrow R_2} \begin{pmatrix} -1 & 2 & b \\ a & 1 & 1 \end{pmatrix}\)
- 第一行乘以 a 加到第二行,消去第二行第一列的元素:\(\overline{A} \rightarrow{R_2 + aR_1} \begin{pmatrix} -1 & 2 & b \\ 0 & 2a + 1 & 1 + ab \end{pmatrix}\)
情况 1:\(2a + 1 \neq 0\)(即 \(a \neq -\frac{1}{2}\))
此时增广矩阵的阶梯形有 2 个非零行,因此 \(\text{rank}(A) = \text{rank}(\overline{A}) = 2\),方程组有唯一解。
从阶梯形回代求解:
- 第二行:\((2a + 1)x_2 = 1 + ab 即x_2 = \frac{ab + 1}{2a + 1}\)
- 第一行:\(-x_1 + 2x_2 = b即 x_1 = 2x_2 – b = \frac{2(ab + 1)}{2a + 1} – b = \frac{2 – b}{2a + 1}\)与行列式方法得到的唯一解一致。
情况 2:\(2a + 1 = 0\)(即 \(a = -\frac{1}{2}\))
此时增广矩阵的阶梯形为:
\(\overline{A} \to \begin{pmatrix} -1 & 2 & b \\ 0 & 0 & 1 – 2b \end{pmatrix}\)
- 若 \(1 – 2b \neq 0\)(即 \(b \neq \frac{1}{2}\)),增广矩阵有 2 个非零行,但系数矩阵的秩 \(\text{rank}(A) = 1\)(第一行非零,第二行全零),因此 \(\text{rank}(A) \neq \text{rank}(\overline{A})\),方程组无解。
- 若 \(1 – 2b = 0\)(即 \(b = \frac{1}{2}\)),增广矩阵的阶梯形为:\(\overline{A} \to \begin{pmatrix} -1 & 2 & \frac{1}{2} \\ 0 & 0 & 0 \end{pmatrix}\)此时 \(\text{rank}(A) = \text{rank}(\overline{A}) = 1\),方程组有无穷多解
特征向量
Eigenvalues & Eigenvectors 特征值和特征向量 – Skyshin34的博客
二次曲线的分类
二次曲线的一般方程(比如 \(3x^2 + 3y^2 + 2xy + \dots = 0\))里有交叉项(如 xy 项),难以直接判断是椭圆、双曲线还是抛物线,因此我们采用以下方法
一共有三步:
- 将二次曲线方程用矩阵表示
- 求矩阵的特征值、特征向量
- 坐标变换,相似对角化
大致原理:
首先将二次曲线按照公式用矩阵表示出来,二次项的矩阵需要是对称矩阵
因为对称矩阵A一定能找到正交矩阵 P,使得 \(P^T A P\) 变成对角矩阵 \(\Lambda\)
这就是 “正交相似对角化”,\(P^T = P^{-1}\),所以也可以写成 \(P^{-1} A P = \Lambda\)
矩阵表示后的二次曲线方程中,将二次项对应的实对称矩阵 A 进行对角化,即将有交叉项的二次曲线方程,变成没有交叉项的标准形式(比如 \(ax’^2 + by’^2 + \dots = 0\))
就能很容易根据 \(a,b\) 的符号、大小判断曲线类型了
另一种表述方式是
定理 1:存在平面旋转变换,可将二次曲线(6)转化为如下形式的二次曲线:
\(\lambda_1 x^2 + \lambda_2 y^2 + 2\phi x + 2\psi y + c = 0\)
1. 二次曲线方程矩阵表示
二次曲线的一般方程(以平面二次曲线为例)包含三类项:
二次项\(ax^2 + bxy + cy^2\)可以通过对称矩阵与向量的乘法表示。
设\(\mathbf{x} = \begin{pmatrix} x \\ y \end{pmatrix}\)
\(\mathbf{x}^T A\mathbf{x} = \begin{pmatrix} x & y \end{pmatrix} \begin{pmatrix} a & \frac{b}{2} \\ \frac{b}{2} & c \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = ax^2 + bxy + cy^2\)
一次项\(dx + ey\)可以表示为列向量与转置向量的乘法。设\(\mathbf{d} = \begin{pmatrix} \frac{d}{2} \\ \frac{e}{2} \end{pmatrix}\)
\(2\mathbf{d}^T \mathbf{x} = 2 \begin{pmatrix} \frac{d}{2} & \frac{e}{2} \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = dx + ey\) (引入系数2是为了后续与二次项的矩阵形式统一,方便整体表示)
常数项:直接保留
- 对称矩阵的正交相似对角化
实对称矩阵的正交相似对角化定理指出:对于 n 阶实对称矩阵 A(即 A 是元素为实数,且满足 \(A^T = A\) 的矩阵) ,必定存在 n 阶正交矩阵 Q(满足 \(Q^TQ = QQ^T = E\),且 \(|Q| = \pm1\)),使得 \(Q^{-1}AQ = Q^TAQ=\Lambda\),其中 \(\Lambda\) 是对角矩阵,其主对角线上的元素为矩阵 A 的 n 个特征值,正交矩阵 Q 的列向量是 A 对应特征值的单位正交特征向量
简单来说:实对称矩阵不仅可以相似对角化,而且还能正交相似对角化,能找到的可逆矩阵是正交矩阵
计算过程
平面旋转变换(变量替换):
正交矩阵 P 对应平面旋转变换,设新坐标 \((x’, y’)\) 与原坐标 \((x, y)\) 的关系为:\(\mathbf{x} = \mathbf{x}’ P\),(即原坐标行向量 \(\mathbf{x}\) 是新坐标行向量 \(\mathbf{x}’ = (x’\ \ y’)\) 与旋转矩阵 P 的乘积)
代入原方程并化简
将 \(\mathbf{x} = \mathbf{x}’ P\) 代入二次曲线的矩阵形式 \(\mathbf{x}A\mathbf{x}^T + 2\mathbf{d}\mathbf{x}^T + c = 0\):
- 二次项部分:\(\mathbf{x}A\mathbf{x}^T = (\mathbf{x}’ P) A (P^T \mathbf{x}’^T) = \mathbf{x}’ (P A P^T) \mathbf{x}’^T\)。由事实 1,\(P A P^T = \begin{pmatrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{pmatrix}\),因此二次项变为 \(\lambda_1 x’^2 + \lambda_2 y’^2\)(交叉项 xy 被消去)。
- 一次项部分:\(2\mathbf{d}\mathbf{x}^T = 2\mathbf{d} (P^T \mathbf{x}’^T) = 2 (\mathbf{d} P^T) \mathbf{x}’^T\)。令 \(\mathbf{d} P^T = (\phi\ \ \psi)\),则一次项变为 \(2\phi x’ + 2\psi y’\)。
- 常数项 c 保持不变
2. 找正交矩阵 – 求对称矩阵的特征值和特征向量 – 作为对称矩阵两侧的可逆矩阵
找正交矩阵的目的是使对称矩阵两侧以某种方式乘以该矩阵和其转置,对对称矩阵正交相似对角化,使其变成对角矩阵。对角矩阵乘以向量就能避免交叉项的出现
\(\begin{align*} \mathbf{x}^T A \mathbf{x} &= \begin{pmatrix} x & y \end{pmatrix} \begin{pmatrix} a & b \\ b & c \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} \\ &= \begin{pmatrix} x & y \end{pmatrix} \begin{pmatrix} ax + by \\ bx + cy \end{pmatrix} \\ &= x(ax + by) + y(bx + cy) \\ &= ax^2 + bxy + bxy + cy^2 \\ &= ax^2 + 2bxy + cy^2 \end{align*}\)
可以看到,当 \(b \neq 0\) 时,\(\mathbf{x}^T A \mathbf{x}\) 展开后包含交叉项 2bxy
坐标变换
当我们做坐标变换 \(\mathbf{y} = P^T \mathbf{x}\)(即 \(\mathbf{x} = P \mathbf{y}\))时,二次项 \(\mathbf{x}^T A \mathbf{x}\) 变为:
\(\mathbf{x}^T A \mathbf{x} = (P \mathbf{y})^T A (P \mathbf{y}) = \mathbf{y}^T (P^T A P) \mathbf{y} = \mathbf{y}^T \Lambda \mathbf{y}\)
由于 \(\Lambda\) 是对角矩阵(设为 \(\begin{pmatrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{pmatrix}\)),则:
\(\mathbf{y}^T \Lambda \mathbf{y} = \lambda_1 y_1^2 + \lambda_2 y_2^2\)
根据对称矩阵的相似对角化:先求对称矩阵的特征值,然后再求对应特征值的特征向量
将特征向量标准化,构成正交矩阵
特征值构成对角矩阵(注意特征向量和特征值的列顺序要一致)
这里涉及该方法的本质,为什么标准形式看不出来二次曲线的图形,是因为所在的坐标系并不正确,之前我们学习相似对角化本质上是将线性变换在原坐标系(标准坐标系)中的表示变换为在新的坐标系下的表示,因此当我们此时对所有变量x应用相似对角化后后,在代数层面是消除了矩阵表示中X = (x,y)导致出现得XY交叉项,几何来看就是换了一个合适的坐标系去看相同的曲线
这一变换的几何意义是:将原坐标系(标准坐标系)转换为以特征向量为基的新坐标系,从而消除二次项的交叉项,便于直接识别二次曲线的形状。
二次曲线一般方程参数判断形状
情况 1:\(\lambda_1\)和\(\lambda_2\)均不为零。
此时,令
\(x_1 = x + \frac{\phi}{\lambda_1}, \quad y_1 = y + \frac{\psi}{\lambda_2}\)
则二次曲线方程可转化为:
\((9) \quad \lambda_1 x_1^2 + \lambda_2 y_1^2 = p\)
其中,\(p = \frac{\phi^2}{\lambda_1} + \frac{\psi^2}{\lambda_2} – c\)。根据\(\lambda_1\)、\(\lambda_2\)和p的取值,可进一步分为以下几类:
- 若\(\lambda_1 > 0\),\(\lambda_2 > 0\),\(p > 0\),则为椭圆;
- 若\(\lambda_1 > 0\),\(\lambda_2 < 0\),\(p > 0\),则为双曲线;
- 若\(\lambda_1 < 0\),\(\lambda_2 < 0\),\(p > 0\),则为空集(无实轨迹);
- 若\(\lambda_1 > 0\),\(\lambda_2 > 0\),\(p = 0\),则为原点(退化的椭圆);
- 若\(\lambda_1 > 0\),\(\lambda_2 < 0\),\(p = 0\),则为两条相交直线(退化的双曲线),方程为\(\sqrt{\lambda_1} x_1 \pm \sqrt{-\lambda_2} y_1 = 0\)。
情况 2:\(\lambda_1\)和\(\lambda_2\)中有一个为零(不妨设\(\lambda_1 \neq 0\),\(\lambda_2 = 0\))。
此时,令\(x_1 = x + \frac{\phi}{\lambda_1}\),则二次曲线方程可转化为:
\((10) \quad \lambda_1 x_1^2 + 2\psi y = p\)
根据\(\lambda_1\)和\(\psi\)的取值,可进一步分为以下几类:
- 若\(\lambda_1 \neq 0\),\(\psi \neq 0\),则为抛物线;
- 若\(\psi \neq 0\),\(\lambda_1 = 0\),则为 x 轴(退化的抛物线);
- 若\(\psi = 0\),且\(\lambda_1\)与p同号,则为两条平行直线,方程为\(y = \pm \sqrt{\frac{p}{\lambda_1}}\);
- 若\(\psi = 0\),且\(\lambda_1\)与p异号,则为空集(无实轨迹)。
例题